
机器人运动学中的运动学约束是指机器人在运动过程中受到的限制,包括位置、姿态、速度和加速度等因素。这些约束会对机器人的自由度产生影响,从而影响机器人的运动和控制。
2024-01-18 16:45
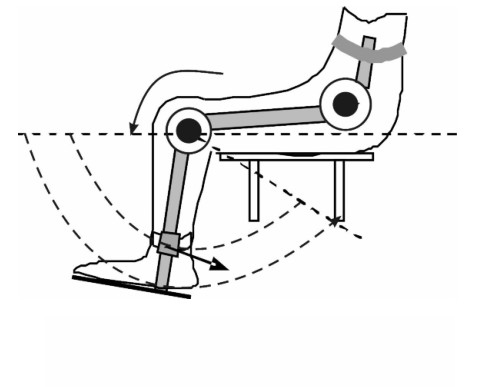
运动提供助力支持。##步行助力机器人与使用者通过束带紧密结合在一起,形成一个高度自动化的人-机一体化系统。 ##实验以原型样机为对象,利用人-机间的交互力传感器进行人-机行走实验,除使用者手拿一个紧急停止按钮外,整个过程由计算机独立控制,无任何操纵杆或控制面板。
2014-02-18 17:50
集成芯片引脚的辨识通常依赖于多种方法,以下是一些主要的辨识方式。
2024-03-19 15:58
本文通过改进算法对光伏组件内部参数进行了准确辨识,将光伏组件仿真模型和实际环境下的实测数据进行了参数辨识和输出特性的预测实验。在仿真试验中,首先通过3种粒子群算法对标况
2018-01-31 11:23
集成芯片引脚的方向辨识主要依赖于芯片的设计特点和标记方式。
2024-03-25 14:07
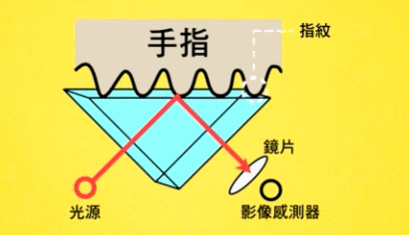
现在越来越多手机加装了指纹辨识系统,在需要要解锁的时候,不用输密码,只要扫一下指纹就能马上解锁,方便了许多。那么我们就来讨论一下这个指纹辨识技术到底是什么原理。
2021-04-18 10:17

驱动系统:可以是液压传动、气动传动、电动传动, 或者把它们结合起来应用的综合系统; 可以是直接驱动或者是通过同步带、链条、轮系、谐波齿轮等机械传动机构进行间接驱动。
2018-04-28 09:54
人脸辨识的核心问题,不管是人脸确认(face verification)或是人脸识别(face identification),都必须在人脸上取出具有「辨别度」的特征值。
2018-07-19 15:33

“概述”区域显示所有现有的TOOLS、BASES和外部运动学,每个都在一个单独的选项卡中。
2024-01-15 10:44
