
P1.0开关接5V时,右转弯灯闪亮,P1.1开关接5V时左转弯灯闪亮。P1.0、P1.1 开关同时接5V或接地时,转弯灯均不闪亮。
2018-03-13 15:56
为了预测转弯车辆的轨迹,我们生成了未来的期望速度。我们期望的速度模型由两个三次函数组成,它是用相交几何来生成的。为了解决无法从任何位置创建[ 1 ]的速度模型的问题,我们在地图中建立了速度控制点。速度控制点被定义为速度变得最小的位置。
2018-11-07 15:18
本系统采用的MPU6050是一个6轴传感器芯片,内部集成了3轴陀螺仪、3轴加速度计和1个可扩展的数字运动处理器DMP,3个16位ADC通道将加速度计和陀螺仪测得的模拟信号转换为数字信号进行输出,保障了测量数据的输出精度。用户可以根据实际需要控制传感器的范围,可准确追踪小车姿态变化。MPU6050通过自带的DMP编程实现自动对加速度计、陀螺仪数据进行处理,减少了主控芯片STM32的计算负担[9]。主芯片和MPU6050传感器电路连接图如图2所示,MPU6050传感器通过传输速率较高的I2C总线和主芯片进行通信。
2018-06-03 09:42
电动三轮车差速器原理是一种用于传动动力的装置,用于允许不同轮胎的转速有所不同。差速器的设计和操作原理是为了解决车辆行驶过程中转弯时内外轮胎的旋转速度不同而导致的问题,即使在转弯时,能够保持车辆的平衡
2024-01-23 11:01

我们之前了解过差速器与差速锁,差速器是在正常的转弯时(由于左右车轮的转弯半径不同,所以轮胎运转速度也不同),而为了避免两侧车轮以相同的速度运转而产生的部件;差速锁是在越野时有轮胎空转而影响通过性能时,强行将差速器锁止的机构。
2016-07-29 17:03
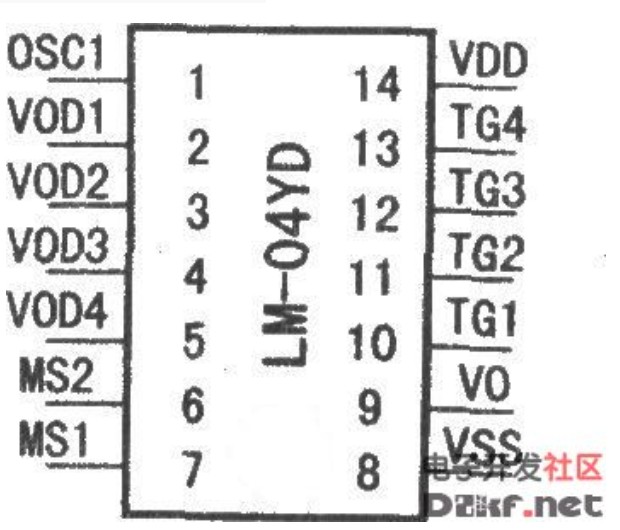
汽车专用语音电路LM-04YD固化了“倒车,请注意”、“左转弯,请注意”、“右转弯,请注意”、“刹车,请注意”等四句语音,可分别独立触发控制4段语音输出,同时提供4个输出口控制各LED闪灯。
2018-07-09 09:30

内轮差是车辆转弯时的前内轮的转弯半径与后内轮的转弯半径之差。由于内轮差的存在,车辆转弯时,前、后车轮的运动轨迹不重合。内轮差的大小与转动方向盘的幅度和车辆轴距的长短有关
2021-04-12 14:18
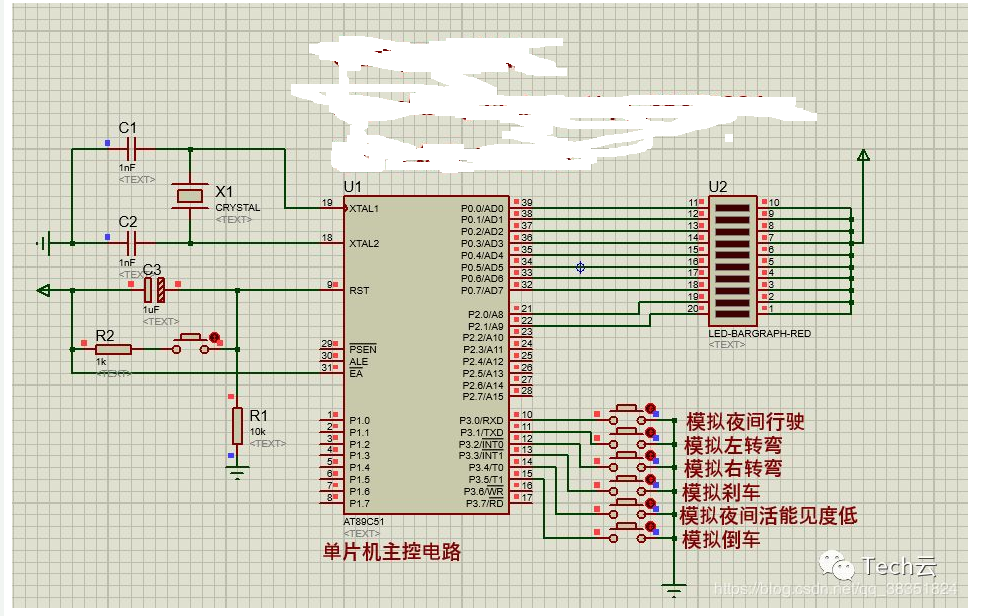
1、汽车车尾左右两侧各有四盏灯:黄灯、红灯、雾灯、倒车照明灯,前面有照明灯(远光、近光)、黄灯、雾灯 2、白天正常行驶时照明灯都不亮,夜间行驶时两个前照明灯都亮。 3、左转弯时左侧黄灯闪亮(2Hz),右转弯时右侧黄灯闪亮。
2019-07-06 09:33
在汽车领域中,磁传感器是一种看不见但又不可或缺的技术,它能使从转弯信号到点火定时的一切都成为可能。
2018-01-31 14:11
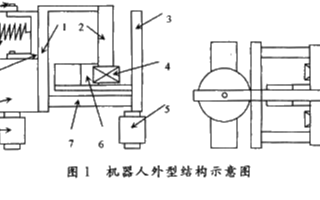
本文介绍的磁驱动微小爬壁机器人,采用电磁吸附技术,尺蠖运动原理,具有结构简单、重量轻、加工制作容易、控制灵活、控制电路简单、转弯速度快等特点。
2020-04-25 17:44