相机的光轴基本与地面平行,相机2D车道线成像和BEV视图可以视为在两个不同的视角下车道线的成像。如果我们能类比图像拼接的方法,将相机视图“拼接”到BEV视图下,理论上可
2023-02-07 09:33

基于视觉系统的车道线检测有诸多缺陷。 首先,视觉系统对背景光线很敏感,诸如阳光强烈的林荫道,车道线被光线分割成碎片,致使无法提取出
2019-03-07 14:02

过去,车道线检测性能多依赖于人工视觉验证的方法。然而这种方法不能客观量化车道线检测系统的性能。同时,由于车道
2018-05-14 10:09
处理复杂道路场景下的视频数据是一项及其艰巨的任务。仅以提取车道线的过程为例,使用设定规则的方式提取车道线,虽然能够处理项目视频中的场景,但面对变化更为恶劣的场景时,还是
2019-01-23 10:27

1.颜色阈值+ 区域掩模 我们可以仅仅通过设置一些RGB通道阈值,来提取车道线。 以下的代码设置了RGB通道阈值为220,大于220的像素将设置为黑色,这样可以将测试图片中的车道
2023-11-17 16:49

接下来,我们需要找到一个最佳起始点来寻找属于左车道线的像素和属于右车道线的像素。一种有效的方法是生成图像中车道
2023-10-13 15:25
为了解决上述的定位错误问题,文章便提出一种混合锚点机制,中间水平角度大的车道线使用横向锚点来表达,两侧水平角度小的车道线用纵向锚点来表达。每条
2023-01-05 11:29
通过理论分析和实验验证可知一二两层返回的信息主要包括路面、车道线、少量障碍物和边界数据;三四两层主要返回道路边界、障碍物和少量路表信息,所以在特征种子点提取阶段需要重点分析一二两层的雷达数据,这部分数据中对于车道
2018-05-25 01:57
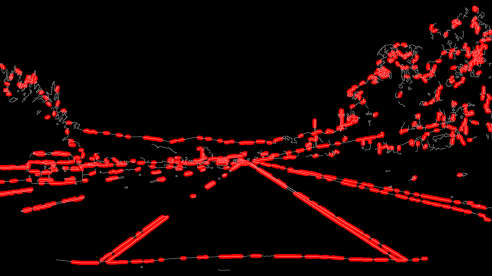
Canny边缘检测+霍夫变换 颜色阈值+图像掩模的方法虽然简单,但是只能应对一些固定颜色车道线的场景。图像像素受光照影响将是一个极其常见的问题。 canny边缘检测+霍夫变换是另外一种简单提取车道
2023-11-17 16:55
虽然我们的图像目前是RBG格式,但是我们应该探索在不同的颜色空间,如HSL或HSV中进行可视化,看看它们是否能够帮助我们更好地隔离车道。注意,HSV通常被称为HSB(色相饱和度和亮度)。
2018-08-01 10:54