
过去,车道线检测性能多依赖于人工视觉验证的方法。然而这种方法不能客观量化车道线检测系统的性能。同时,由于车道
2018-05-14 10:09
通过理论分析和实验验证可知一二两层返回的信息主要包括路面、车道线、少量障碍物和边界数据;三四两层主要返回道路边界、障碍物和少量路表信息,所以在特征种子点提取阶段需要重点分析一二两层的雷达数据,这部分数据中对于车道
2018-05-25 01:57
虽然我们的图像目前是RBG格式,但是我们应该探索在不同的颜色空间,如HSL或HSV中进行可视化,看看它们是否能够帮助我们更好地隔离车道。注意,HSV通常被称为HSB(色相饱和度和亮度)。
2018-08-01 10:54
认识图像前,我们需要先回顾一下在初中所学的物理知识——光的三原色,光的三原色分别是红色(Red)、绿色(Green)和蓝色(Blue)。通过不同比例的三原色组合形成不同的可见光色。如下图所示。
2019-02-04 16:10

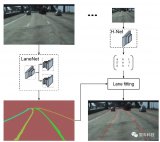
最后,我们来看看处理后的车道线逻辑。首先,用深度学习神经网络扫描2D图像的每个像素以确定它是否属于行车道,以便生成像素化的车道线
2018-05-30 10:54
标记的相关特征。类似地,Kim和Lee [19]将卷积神经网络(CNN)与RANSAC算法结合起来以检测车道线。
2018-06-07 10:20
视觉传感器具有车道线识别、障碍物检测、交通标志和地面标志识别、交通信号灯识别、可行空间检测等功能。
2019-07-31 10:51
矢量高精地图(vectorized high-definition map)是应用于自动驾驶的高精度结构化电子地图,其由驾驶场景各类地图要素(如人行横道、车道线、路沿等)的矢量化表示构成,为决策规划、轨迹预测、环境感知提供重要的高层级语义信息。
2022-09-09 10:55

传感器感知的对象包括行驶路径、周围障碍物和行驶环境等。感知行驶路径是对可通行性道路的识别,在城市中包括信号灯、各种标志牌、车道线、路障等目标的识别;在野外包括车辆前方路面平坦情况、可通行道路分析等。
2019-03-14 14:38
在自动驾驶赛道中,感知的目的是为了模仿人眼采集相关信息,为后续做决策提供必要的信息。根据所做决策的任务不同,感知可以包括很多子任务:如车道线检测、3D目标检测、障碍物检测、红绿灯检测等等;再根据感知预测出的结果,完成决策;最后根据决策结果执行相应的操作(如变道、超
2022-10-09 17:54