针对存在移动车辆遮挡等强干扰的情况,提岀了一种基于轮廓筛选的车道线裣测方法。首先基于轮廓角度和像素数目滤除非车道轮廓进而实现特征点粗提取,然后提取像素点的位置信息,通过设计一种基于相对距离与梯度
2021-05-08 14:09
单目视觉车道线识别算法及其ARM实现
2017-09-24 11:38
车道线检测主要用于驾驶辅助和无人驾驶系统,根据摄像头数量,分为单目和双目两种检测系统。出于实时性和经济性的考虑,一般采用单目检测,在对采集过来的图像预处理之后进行边缘检测和霍夫变化,提取出图像中
2018-01-31 11:26
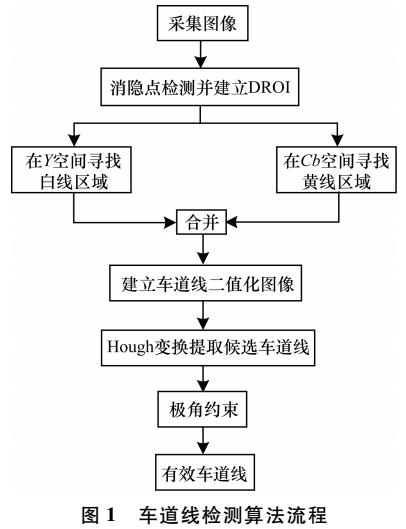
、集成性和可靠性。 车道线识别算法研究 本文提出的车道线识别算法的流程如下图1所示,首先通过OV7670摄像头捕获道路图像,然后按照流程图中的步骤处理图像,最后得到清晰
2017-11-21 10:37

单片机车道线检测模型(4)——图像处理算法
2021-11-16 18:06
对于更安全的自动驾驶汽车而言,尚未完全解决的问题之一就是车道线检测。由于自动驾驶场景的特殊性,完成此任务的方法必须做到实时(+30...
2022-01-26 19:20

本文旨在提高视觉导航系统的通用性、实时性和鲁棒性,对智能车辆的道路识别算法、车道线识别算法进行了探索与研究。
2012-04-06 15:33
智能车辆(Ⅳ)是近年来各国在智能交通中潜心研究的一个重要领域,其 中,基于视觉的结构化道路环境识别研究成为研究的重点。结构化道路环境的检 测与识别的一个主要方面就是对路
2011-05-09 18:14
System, ADAS)作为智慧交通的重要组成部分应运而生。 ADAS作为自动驾驶技术的核心,应用了大量传感器,如摄像头、激光、雷达、全球定位系统等。其中基于摄像头的辅助系统以成本低和信息采集全面的优点而被广泛应用于自动驾驶领域,其由车道线检测、偏离预警等基本
2018-02-24 09:08
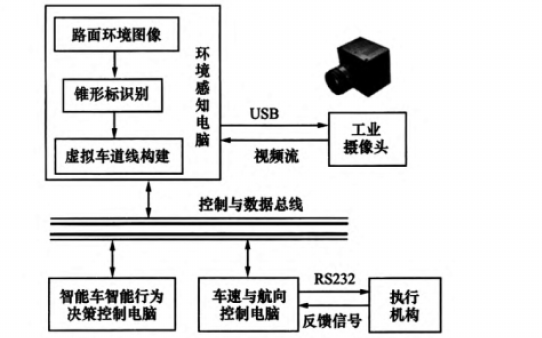
的拓补关系构建虚拟车道线的方法。研究结果表明:该方法可有效地处理感知环境中的行人与运动车辆等干扰信息,满足智能车对系统的实时性和鲁棒性要求;该方法在结构化道路与非结构化道路均可实施,是一种快速构建智能车测试环境
2020-10-26 17:08