
过去,车道线检测性能多依赖于人工视觉验证的方法。然而这种方法不能客观量化车道线检
2018-05-14 10:09

1.颜色阈值+ 区域掩模 我们可以仅仅通过设置一些RGB通道阈值,来提取车道线。 以下的代码设置了RGB通道阈值为220,大于220的像素将设置为黑色,这样可以将测试图片中的车道
2023-11-17 16:49
处理复杂道路场景下的视频数据是一项及其艰巨的任务。仅以提取车道线的过程为例,使用设定规则的方式提取车道线,虽然能够处理项目视频中的场景,但面对变化更为恶劣的场景时,还是
2019-01-23 10:27
认识图像前,我们需要先回顾一下在初中所学的物理知识——光的三原色,光的三原色分别是红色(Red)、绿色(Green)和蓝色(Blue)。通过不同比例的三原色组合形成不同的可见光色。如下图所示。
2019-02-04 16:10
自动驾驶将在未来十年给旅行带来革命性的变化。目前,自动驾驶应用正在进行各种应用案例的测试,包括乘用车、机器人出租车、自动商业送货卡车、智能叉车和用于农业的自动拖拉机。
2021-03-27 09:06

接下来,我们需要找到一个最佳起始点来寻找属于左车道线的像素和属于右车道线的像素。一种有效的方法是生成图像中车道
2023-10-13 15:25
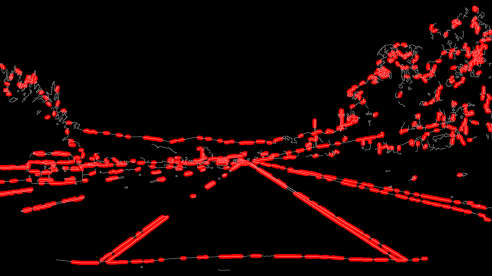
Canny边缘检测+霍夫变换 颜色阈值+图像掩模的方法虽然简单,但是只能应对一些固定颜色车道线的场景。图像像素受光照影响将是一个极其常见的问题。 canny边缘检测+霍
2023-11-17 16:55
为了解决上述的定位错误问题,文章便提出一种混合锚点机制,中间水平角度大的车道线使用横向锚点来表达,两侧水平角度小的车道线用纵向锚点来表达。每条
2023-01-05 11:29
导读:本期为 AI 嵌入式简报: 今日推送干货多多,为关注嵌入式AI的你量身定制~ 1. 澎峰科技CEO张先轶详解利用AI开发板实现面向无人机的嵌入式视觉应用开发 本文为澎峰科技CEO张先轶在智东西主办的“无人机视觉创新论坛”的演讲内容。张先轶老师的演讲主题为《利用AI开发板实现面向无人机的嵌入式视觉应用开发》。 在本次演讲中,张先轶老师首先介绍了AI开发板硬件选型,之后对嵌入式AI软件性能和相关算法的优化展开详细分析。 本文为此次演讲
2020-12-21 11:06
