路径规划通常指全局的路径规划,也可以叫全局导航规划,从出发点到目标点之间的纯几何
2018-09-09 09:11
本文会用matlab实现Dijkstra算法,并且会分享一些函数用法的链接,也是本人学习得来,供大家参考,批评指正。
2023-09-06 15:36
a. 本栏路径规划利用矩阵(二维数组)来表示栅格地图(因为对于矩阵,无论MATLAB、C++还是Python,矩阵更适合数组的表达,更便于编程。)
2023-03-15 11:40
众所周知,无人驾驶大致可以分为三个方面的工作:感知,决策及控制。
2022-11-08 11:13
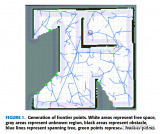
机器人对未知环境的自主探索是机器人智能化的关键技术。为了提高搜索效率,作者提出了一种基于边界点优化和多步路径规划的搜索策略。他们主要对边界点优化、边界点选择、路径规划三
2023-06-19 10:19

首先告诉大家,我们所说的“路径”的是后者——trajectory。我们看一下这两种“路径”在机械臂的世界里有什么区别。
2019-04-20 10:52

Dijkstra(迪杰斯特拉)算法是最短路算法的经典算法之一,由E.W.Dijkstra在1959年提出的。该算法适于计算道路权值均为非负的最短路径问题,可以给出图中某一节点到其他所有节点的最短路径,以思路清晰,搜索准确见长。相对的,由于输入为大型稀疏矩阵,又具有
2018-05-24 10:27

如何规划机器人的运动方式是机器人开发领域的一大课题,本文分享GitHub的一个机器人技术中常用的路径规划算法的开源库,并用动图直观演示运行过程。其中大部分代码由Python实现。
2023-10-21 09:36
iDAR可实现快速动态感知和路径规划,结合世界首款灵敏的MOEMS LiDAR、预融合弱光摄像头、嵌入式人工智能,实现软件可定义和硬件可扩展,并可根据实时需求进行动态调整。
2018-01-02 12:41
从图中我们可以看出,扫地机器人能将其所经过的区域绘制成地图,规划清扫路径,从而进行清扫。这种即时定位与地图构建技术,就是我们所说的SLAM技术。要利用SLAM技术,首先需要机器人配置至少一个测距装置,通过测距装置获取机器人周围环境的信息。目前比较常见的测距装置主要
2018-09-10 11:07