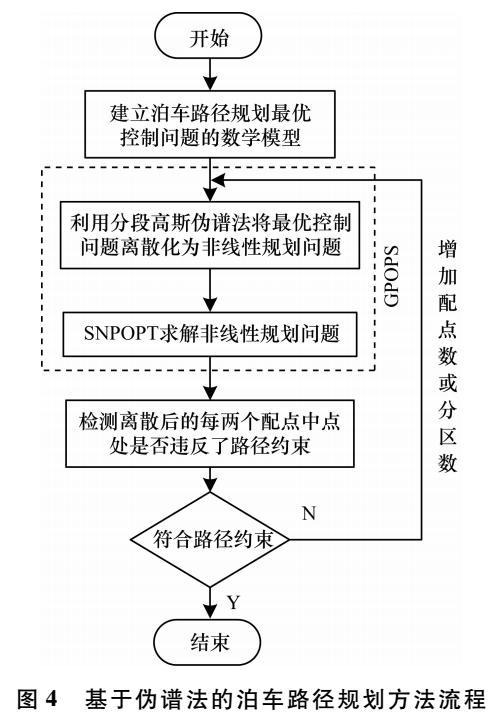
目前对泊车方法的相关研究仅适用于平行泊车和垂直泊车中的一种泊车场景。为此,提出通用性的自主泊车路径规划方法。该方法融合车辆运动学约束和路径约束,以泊车时间为性能指标,建立泊车路
2018-02-24 10:36
多智能体路径规划是一类寻找多个智能体从起始位置到目标位置且无冲突的最优路径集合的问题,针对该问题的研究在物流、军事和安防等领域有着大量的应用场景。对国内外关于多智能体路径
2021-06-04 11:56

路径规划是自动驾驶技术中最重要的部分,之前的文章有一些这方面的介绍,但是并不全面和系统: 初探路径规划:主要从 带约束的多项式拟合;贝赛尔曲线;三次样条差值;等角度介
2023-06-01 15:12
路径规划与识别作为智能机器人研究的最重要因素,具有重要的理论意义和实用价值。但传统的人工势场法在路径规划中存在目标不可达和局部最小值点的缺点,影响机器人到达目标点。针对
2017-11-06 16:32
接下来的几篇文章将主要围绕着全局路径规划的常见算法展开。全局路径规划与局部路径规
2023-06-07 14:23
笔者简要介绍智能控制下的AGV, 阐述其重要的两个路径规划, 在静态已知环境中的路径规划和动态复杂环境中的路径
2016-08-29 15:02
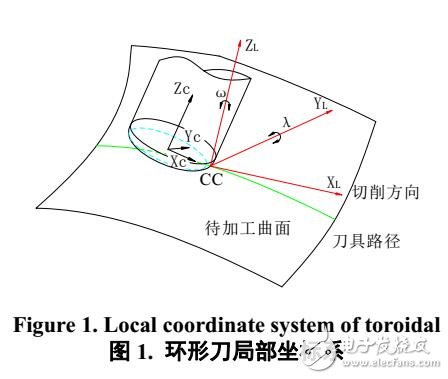
根据路径的拓扑结构和参数,从算法简单程度、计算量、效率及加工精度等方面,分析了国内外现有的数控加工刀具路径规划的方法及优缺点,结合环形刀及被加工曲面的局部几何特征,提出了一种新的刀具
2018-01-16 15:25
为解决拖挂式移动机器人系统路径规划算法精准性低、稳定性差和无法考虑系统间安全性等的问题,提出一种基于路径跟踪方法的路径规划
2017-12-04 14:18
路径规划是游戏人工智能领域的核心问题,如何建立一种高效的路径规划方法仍是研究的热点之一。针对游戏中NPC的路径
2017-11-14 14:55
无人驾驶汽车是集多种技术于一体的复杂系统,其中路径规划与跟随控制是 无人驾驶技术的重要组成部分。路径规划是汽车实现自动驾驶的基础,跟随控制 是无人驾驶技术的关键。
2023-07-19 11:22