路径规划在很多领域都具有广泛的应用。在高新科技领域的应用有:机器人的自主无碰行动;无人机的避障突防飞行;巡航导弹躲避雷达搜索、防反弹袭击、完成突防爆破任务等。在日常生活领域的应用有:GPS导航;基于GIS系统的道路规划;城市道路网规划导航等。
电子发烧友
1.6w次浏览
机器人路径规划学习者一枚,谁了解现在最新的路径规划方法及实现,求指教,不胜感激啊。。。。。。。。。。。
2013-09-03 21:15
路径规划是移动机器人导航最基本的环节,指的是机器人在有障碍物的工作环境中,如何找到一条从起点到终点适当的运动路径,使机器人在运动过程中能安全、无碰撞地绕过所有障碍物。
2020-12-26 10:49
我现在在做机器人的路径规划,想用人工势场的算法,通过用这个labview仿真,就是给定一些起始点,终点,还有这个障碍物的坐标,中间是这个算法计算出来的一些点,能够在执行算法的时候用labview描出这些点,最终形成一条规划
2017-05-15 15:25
无人驾驶路径规划 众所周知,无人驾驶大致可以分为三个方面的工作:感知,决策及控制。 路径规划是感知和控制之间的决策阶段,主要目的是考虑到车辆动力学、机动能力以及相应规则
2023-11-24 15:57
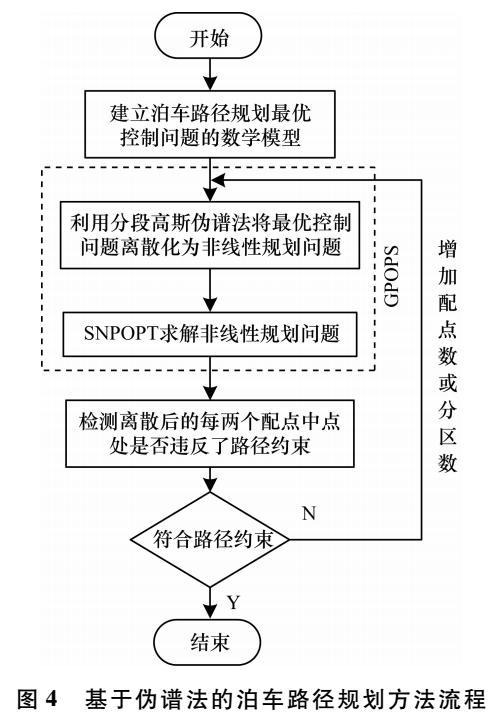
目前对泊车方法的相关研究仅适用于平行泊车和垂直泊车中的一种泊车场景。为此,提出通用性的自主泊车路径规划方法。该方法融合车辆运动学约束和路径约束,以泊车时间为性能指标,建立泊车路
2018-02-24 10:36
我现在做这个机器人的路径规划,有一个人工势场的算法,已经用C实现算法,请问一下能否用这个labview仿真,就是给定一些起始点,终点,还有这个障碍物的坐标,中间是这个算法计算出来的一些点,能够在执行算法的时候用labview描出这些点,最终形成一条
2015-04-22 16:04
多智能体路径规划是一类寻找多个智能体从起始位置到目标位置且无冲突的最优路径集合的问题,针对该问题的研究在物流、军事和安防等领域有着大量的应用场景。对国内外关于多智能体路径
2021-06-04 11:56

路径规划是自动驾驶技术中最重要的部分,之前的文章有一些这方面的介绍,但是并不全面和系统: 初探路径规划:主要从 带约束的多项式拟合;贝赛尔曲线;三次样条差值;等角度介
2023-06-01 15:12
路径规划与识别作为智能机器人研究的最重要因素,具有重要的理论意义和实用价值。但传统的人工势场法在路径规划中存在目标不可达和局部最小值点的缺点,影响机器人到达目标点。针对
2017-11-06 16:32
移动这一简单动作,对于人类来说相当容易,但对机器人而言就变得极为复杂,说到机器人移动就不得不提到路径规划,路径规划是移动机器人导航最基本的环节,指的是机器人在有障碍物
2019-09-06 21:34