为解决拖挂式移动机器人系统路径规划算法精准性低、稳定性差和无法考虑系统间安全性等的问题,提出一种基于路径跟踪方法的路径规划算法
2017-12-04 14:18
A星路径规划算法完整代码资料汇总
2021-12-03 17:16
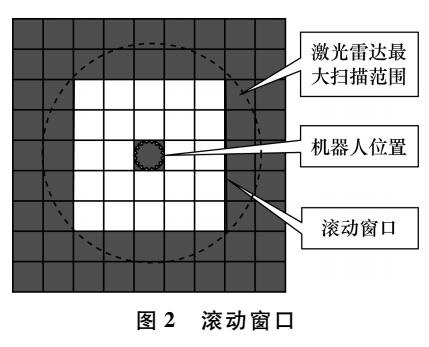
自主构建环境地图,具有重要的现实意义。 针对智能机器人如何以最优探测路线自主探测和构建室内环境地图的问题,提出一种基于滚动窗口的路径规划算法。将传统遍历构图的牛耕遍历方式改进为未知环境的探测策略,并结合滚动窗
2018-02-27 10:02

路径规划算法是自主水下航行器(AUV)完成水下自主巡航的核心算法之一。分别综述了基于环境建模和路径搜索两类AUⅣ路径
2021-04-09 16:01

嵌入式GIS中最优路径规划算法研究与实现(嵌入式开发项目经理)-嵌入式GIS中最优路径规划算法研究与实现
2021-07-30 12:49
基于实时交通信息的动态路径规划算法性能比较_黄西洲
2017-03-16 10:04

未知环境及动态障碍的改进人工势场( Artificial Potential field,APF)路径规划算法。在该算法中,智能体构建了以目标点为中心的引力势场,以及以障碍物为中心的斥力势场,在智能体行进路途中感知局
2021-04-14 14:52

针对多 Agent 路径规划问题,提出了一个两阶段的路径规划算法。首先,利用改进的蚁群算法来为每个Agent
2019-04-26 16:24

为了缓解无线传感器网络(WSN)中传感器节点分布不均匀、传感器节点感知数据量不同而造成能耗不均衡、热区等问题,提出一种优化网络生命周期和最短化路径的WSN移动sink路径规划算法(MSPPA)。首先
2017-11-29 14:46
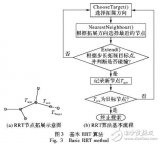
针对快速探索随机树( RRT)算法进行路径规划时随机性大且未考虑移动代价的问题,提出了任意时间快速探索随机树算法。生成一组快速探索随机树,之后每个树都重新使用上个树的信
2018-02-10 11:57