为研究双足步态,弗吉尼亚理工大学机器人和机械实验室(RoMela)设计了最初的智能型动态拟人机器人(DARwIn)。在RoMela,我们在硬件上测 试了步态研究的设想和理论。我们决定用RoboCup这一国际性机器人足球比赛作为展示这一款机器人优越性和可行性的舞台,同时展示DARwIn的鲁棒 性。
2018-08-24 14:09
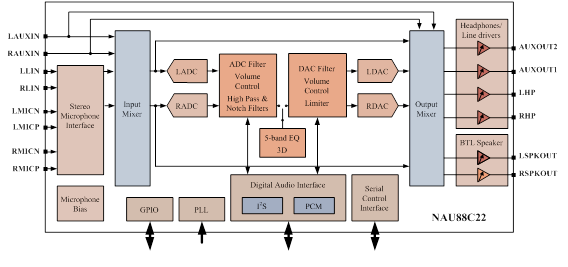
NAU88C22是一种适用于可携式及通用音讯应用的低功率、高质量编解码器。
2019-11-21 09:22
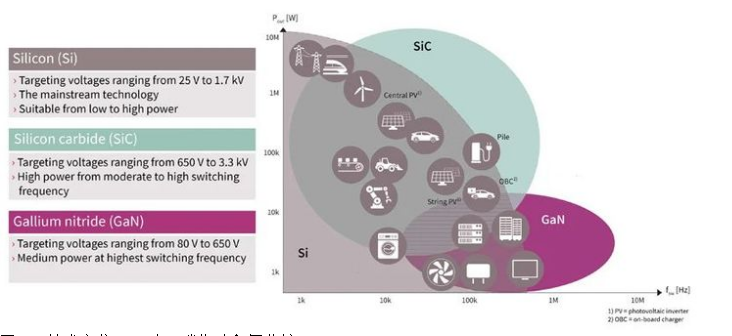
碳化硅和氮化镓技术的“甜区”在哪里?
2021-06-02 11:14
上面讲了很多系统变量,那么在Linux系统中,这些变量存在哪里呢?为什么用户一登录shell就自动有了这些变量呢?我们先来看看下面几个文件。
2022-11-16 09:46
追星仪和陀螺仪实现的类似于VR中的光学定位及姿态捕捉。一直以来,大家都在说VR定位动捕技术难,那到底难在哪里呢?作者系VR行业从业者,本文将会探讨下这个问题。
2016-05-20 10:20
pcb软板和硬板的区别在哪里?本文介绍了PCB印制电路板生产过程,FPC软性电路板分类以及PCB软硬复合板的优缺点。通过比较分析pcb软板和硬板不同之处。
2017-12-21 11:41
以 YouTube 视频的帧作为输入,我们使用 field lines 来恢复摄像机参数。然后,提取边界框、姿势和轨迹(跨多个帧)来分割球员。通过在视频游戏数据上训练好的深度网络,我们在游戏环境中重建了每个球员的深度图,这样就可以在 3D 查看器或 AR 设备上呈现出来。
2018-07-03 10:30
STM32的优点在哪里? 除去宣传环节,细细分析。 STM32时钟不算快,72MHZ, 也不能扩展大容量的RAM FLASH, 同样没有DSP那样强大的指令集。 它的优势在哪里呢? ---就在快速
2018-05-22 07:32

JK触发器是数字电路触发器中的一种基本电路单元。JK触发器具有置0、置1、保持和翻转功能,在各类集成触发器中,JK触发器的功能最为齐全。在实际应用中,它不仅有很强的通用性,而且能灵活地转换其他类型的触发器。由
2019-11-08 14:48
主要介绍udp和tcp的区别在哪里,以及TCP协议和UDP协议为什么会共存?通常我们在说到网络编程时默认是指TCP编程,即用前面提到的socket函数创建一个socket用于TCP通讯,函数参数我们
2017-12-08 14:08