藍牙4.0无线传输链接將获得的数据发送到目标主机,使傳統鼠標脫離對桌面的依賴,只需輕揮手腕,即可實現懸空3D操作,隨意移動控制屏幕光標。
2015-08-17 10:06

相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个坐标
2023-07-03 10:30

可以看一下单目深度估计效果,这个深度图的分辨率是真的高,物体边界分割的非常干净!这里也推荐工坊推出的新课程《单目深度估计方法:算法梳理与代码实现》。
2023-12-17 10:01
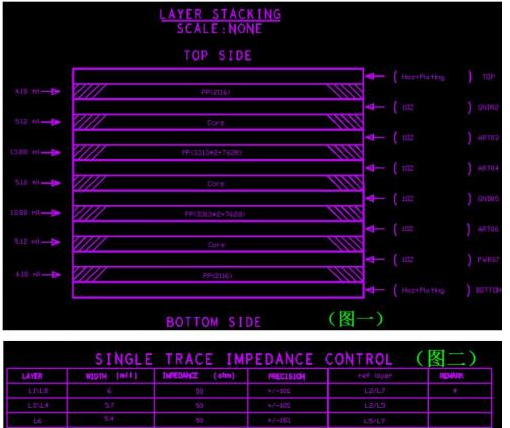
设计的线宽线距应该考虑所选PCB生产工厂的生产工艺能力,如若设计时设置线宽线距超过合作的PCB生产厂商的制程能力,轻则需要添加不必要的生产成本,重则导致设计无法生产。一般正常情况下线宽线距控制到6/6mil,过孔选择
2019-10-04 16:35
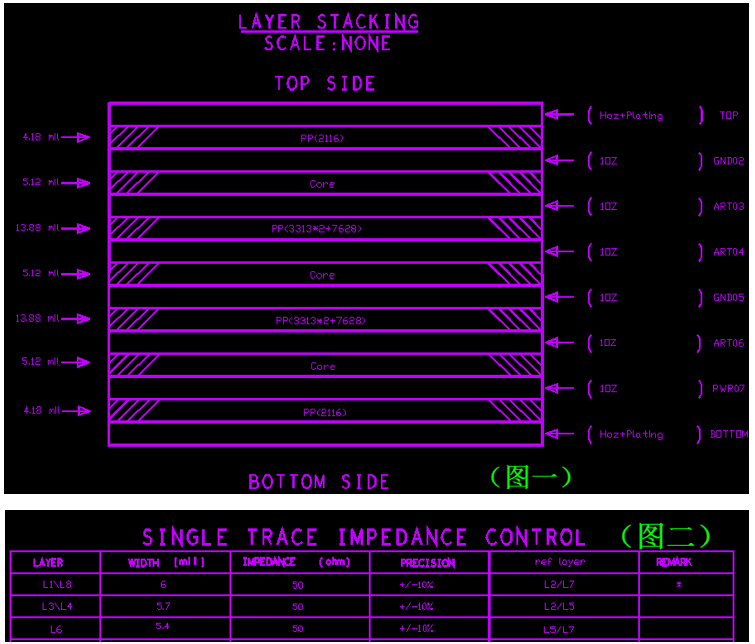
一丶 需要要做阻抗的信号线,应该严格按照叠层计算出来的线宽、线距来设置。比如射频信号(常规50R控制)、重要单端50R、差分90R、差分100R等信号线,通过叠层可计算出具体的线宽线距(下图
2020-10-06 20:54

线宽线距最小控制到 3.5/3.5mil,过孔选择 8mil(0.2mm),这时候有部分PCB生产厂商生产不了,价格会更贵一点。线宽线距最小控制到 2/2mil,过孔选择 4mil(0.1mm,此时
2019-04-23 17:30

世界坐标系:在OpenGL中,世界坐标系是以屏幕中心为原点(0, 0, 0),且是始终不变的。你面对屏幕,你的右边是x正轴,上面是y正轴,屏幕指向你的为z正轴。长度单位这样来定:窗口范围按此单位恰好是(-1,-1)到(1,1),即屏幕左下角坐标为(-1,-1),右
2018-05-04 09:00

我的论文方向目前是使用单目摄像头实现机器人对人的跟随,首先单目摄像头与kinect等深度摄像头最大的区别是无法有效获取深度信息,那就首先从这方面入手,尝试通过图像获取摄像头与人的距离。
2023-07-03 10:01

