
近年来,SLAM技术取得了惊人的发展,领先一步的激光SLAM已成熟的应用于各大场景中,视觉SLAM虽在落地应用上不及激光SLAM
2023-09-05 09:31

在业内,视觉SLAM与激光SLAM谁更胜一筹,谁将成为未来主流趋势这一问题,成为大家关注的热点,不同的人也有不同的看法及见解,以下将从成本、应用场景、地图精度、易用性几个方面来进行详细阐述。
2020-08-28 14:53
随着传感器种类和安装方式的不同,SLAM的实现方式和难度会有很大差异。按传感器来分,SLAM主要分为激光、视觉两大类。其中,激光SLAM研究较早,理论和工程均比较成熟。
2019-05-12 10:31
本文是调研视觉SLAM中的实现方法的总结,包括三方面内容:姿态计算、闭环检测、BA优化。
2019-05-18 11:49
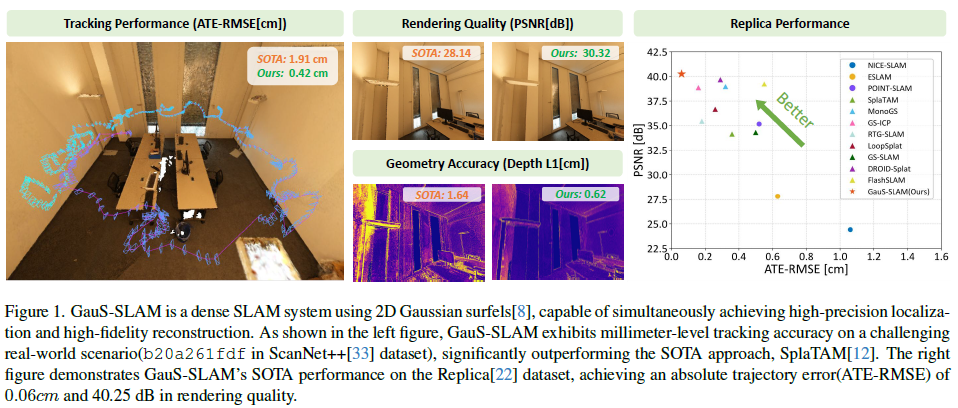
基于高斯的场景表示在新视角下会出现几何失真,这大大降低了基于高斯的跟踪方法的准确性。这些几何不一致主要源于高斯基元的深度建模以及在深度融合过程中表面之间的相互干扰。为了解决这些问题,我们提出了一种基于二维高斯的增量重建策略,并结合了表面感知深度渲染机制,这显著提高了几何精度和多视角一致性。此外,所提出的局部地图设计在跟踪过程中动态隔离可见表面,减轻了全局地图中被遮挡区域引起的错位,同时随着高斯密度的增加保持了计算效率。
2025-05-15 10:36
SLAM(同步定位与地图构建),是指运动物体根据传感器的信息,一边计算自身位置,一边构建环境地图的过程,解决机器人等在未知环境下运动时的定位与地图构建问题。
2018-11-14 08:54

近期兴起的神经辐射场(NeRF)与三维高斯泼溅(3DGS)技术在视觉SLAM中展现出令人鼓舞的突破性成果。然而,当前主流方法多依赖RGBD传感器,并且仅适用于室内环境。在大规模室外场景中的重建鲁棒性
2025-05-27 14:13

地图点/路标点:将图像上被观察到的特征点通过三角化等方式进行深度恢复,我们就可以得到其对应的在三维空间的位置,同时包含帧的观测信息,这种点就被称为地图点或路标点。
2023-11-09 17:25

本文旨在介绍使用OptiTrack光学跟踪系统和Turtlebot机器人进行视觉SLAM定位实验的详细流程,包括实验平台搭建过程、数据处理过程以及SLAM估计评估方法。 由于涉及知识较多,部分内容只
2023-06-13 09:24
深度相机也具备普通相机的一些不足,容易受视差影响:包括黑色物体(特征点少)、透明物体(光的穿透)、光滑物体(光反射太强)、图像无纹理(特征点少)、过度曝光(特征点少)等。
2022-03-11 13:38