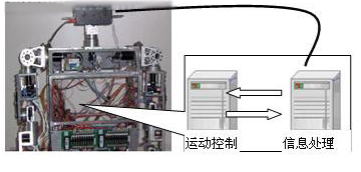
视觉跟踪的实时性是仿人机器人的重要性能要求之一。针对这一系统要求,近年来有很多学者设计出了多种系统结构。文中作者设计了一种基于CAN总线的分布式的仿人机器人的控制系统,其中的视觉系统通过无线局域网
2021-04-13 14:18
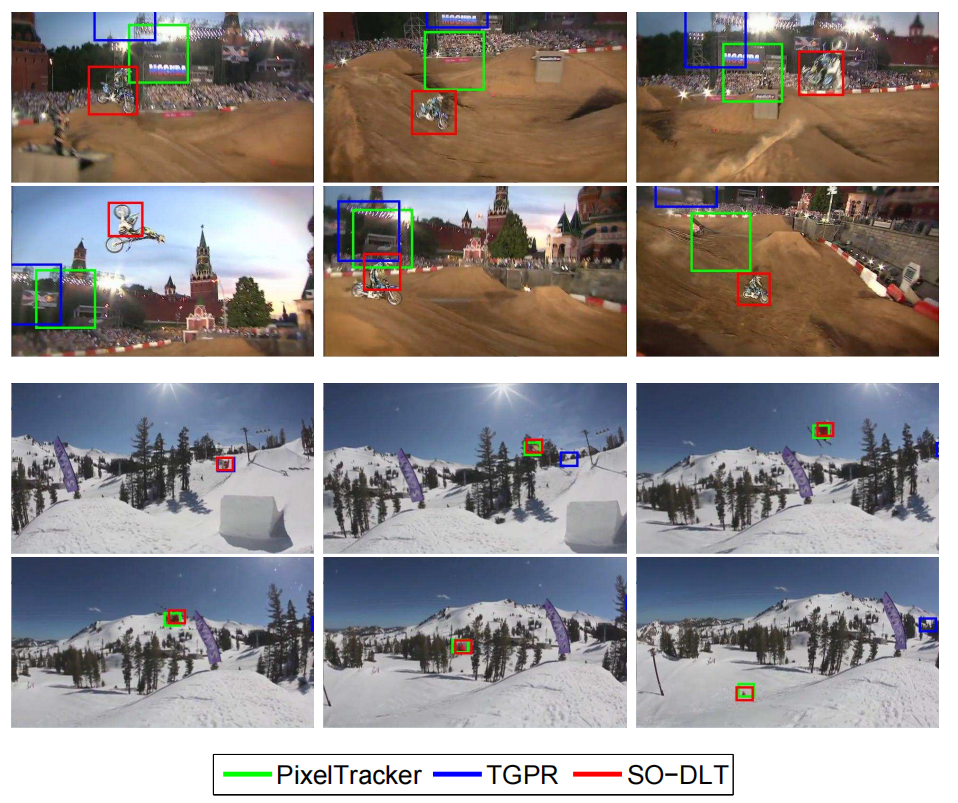
原文链接 论文地址:https://arxiv.org/pdf/1501.04587.pdf 摘要 阻碍CNN应用于视觉跟踪的主要障碍是缺乏适当标记的训练数据。虽然释放CNN功率的现有应用程序通常
2023-01-12 10:44
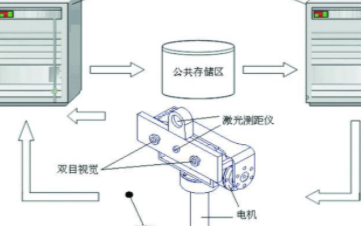
视觉是人类感知外界信息的重要手段,视觉伺服系统是机器人获取环境信息的关键组成部分。本文主要讨论仿人机器人BHR-1的视觉伺服系统。首先介绍机器人头部的视觉总体结构方案,
2021-04-13 12:00
/SiamRPN_plus_plus_PyTorch 摘要 基于孪生网络的跟踪器将跟踪表述为目标模板和搜索区域之间的卷积特征互相关。然而孪生网络的算法不能利用来自深层网络(如 resnet-50或更深层)的特征,与先进的算法相比仍然
2023-01-11 17:52

本文以新型航天器燃料贮箱LF6 铝合金材2 mm 薄板的对接焊接为背景, 针对脉冲钨极惰性气体保护焊( GT AW) 焊接方法, 对平板直缝和平板法兰进行焊缝跟踪试验, 将传统的“示教再现”
2011-11-17 11:08
接下来总体介绍下目标跟踪。这里说的目标跟踪,是通用单目标跟踪,第一帧给个矩形框,这个框在数据库里面是人工标注的,在实际情况下大多是检测算法的结果,然后需要跟踪算法在后续
2018-05-07 16:58
对象跟踪问题一直是计算机视觉的热点任务之一,简单的可以分为单目标跟踪与多目标跟踪,最常见的目标跟踪算法都是基于检测的
2022-09-14 16:20

本文旨在介绍使用OptiTrack光学跟踪系统和Turtlebot机器人进行视觉SLAM定位实验的详细流程,包括实验平台搭建过程、数据处理过程以及SLAM估计评估方法。 由于涉及知识较多,部分内容只
2023-06-13 09:24

多目标跟踪是计算机视觉领域中的一个重要任务,它旨在从视频或图像序列中准确地检测和跟踪多个移动目标。不过在落地部署时,有一些关键点需要解决。
2024-04-28 09:42
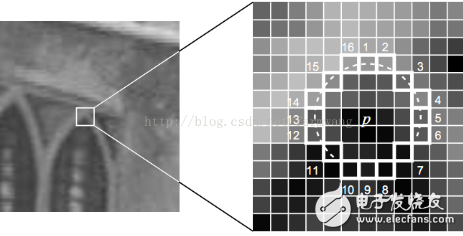
特征点检测和匹配是计算机视觉中一个很有用的技术。在物体检测,视觉跟踪,三维常年关键等领域都有很广泛的应用。这一次先介绍特征点检测的一种方法——FAST(features from
2017-11-29 09:10