电子发烧友
7035次浏览
快速有效提取浓密视差图的方法:采用边缘匹配和区域相关相结合的办法,用Gauss-Laplace算子首先对图像进行运算,提取图像的边缘像素,并根据一定约束条件匹配边缘像素,再将图像对视作对称,以相关值
2009-06-14 00:21
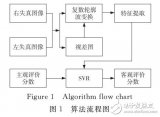
现有的2D图像质量评价方法并不能很好地应用于立体图像质量评价中。为了有效评价不同失真立体图像的质量,提出了一种基于视差图和复数轮廓波变换的无参考图像质量评价方法。首先提取了能够反映3D信息的视差
2017-11-22 11:38
采用边缘匹配和区域相关相结合的办法,用Gauss-Laplace算子首先对图像进行运算,提取图像的边缘像素,并根据一定约束条件匹配边缘像素,再将图像对视作对称,以相关值互为最
2009-04-26 18:23

我们从左边的图像开始。使用左图不是强制的,我就是这么用的。太大的块会产生平滑的图像,太小的块会产生噪声。
2023-05-31 10:14
,并分析了不同视差图对模型性能的影响。该方法将左右视图以及视差图小块作为输入,自动提取特征,通过训练得到回归模型,从而实现对立体图像的预测。文中使用了5种不同立体匹配算
2021-05-07 14:09
事实上,这些指标都在强调视差图在视差方向上的准确性,却没有怎么强调视差图与原图之间的贴合性——或者说,它们都在强调Z方向
2022-10-19 15:12
式中,L、R和D分别代表左视图、右视图和对应的绝对差值图的亮度值。绝对差值图并不是严格意义上的视差图,但是它的计算方法最为简单,速度快,它给出的结果可以作为参考
2019-02-11 16:32

在得到初始视差图后,需要进一步判别障碍物的远近及大小,所以这里引入 V-视差和 U-视差理论 [7] 。 V-视差
2018-11-29 16:27
而下面左图是OpenCV的SGBM算法得到的视差图,右边则是通过我今天要介绍的算法处理后的视差图。看了它们后,我想你应该对什么叫做”化腐朽为神奇“有了深刻印象了吧。
2023-01-03 10:59
演进行计时。对于作者定制的3D到2D投影算法,又设计了一个覆盖层来加速乘法累加(MAC)操作,然后通过Jupyter笔记本在PYNQ板上进行测试。未来将为视频输入设计自定义覆盖,以加速视差图和三维点云生成
2021-01-07 17:25