
立体匹配是计算机视觉的重要领域,通过给定一对经过校正的图像,计算对应像素之间的位移,即视差。
2023-05-16 09:05
双目立体匹配可划分为四个步骤:匹配代价计算、代价聚合、视差计算和视差优化。
2020-08-31 10:08
摘要:针对基于双目深度图的室外大规模地图构建计算冗长,而在无人系统的有限算力下,计算效率需求显著的情况,文中提出一种基于双目视觉立体匹配的三维地图构建方法。首先针对由立体匹配算法及原图引入的噪声误差
2022-08-10 11:38
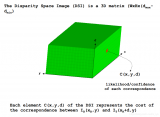
根据Schrstein和Szeliski的总结,双目立体匹配可划分为四个步骤: 匹配代价计算、代价聚合、视差计算和视差优化 。 一 、匹配代价计算 匹配代价计算 的目的
2023-06-28 16:59
我们都知道特征检测和匹配是计算机视觉领域中的重要任务,它们在许多应用中发挥着关键作用,比如SLAM、SFM、AR、VR等许多算法都需要稳定精确的特征检测和
2023-06-19 11:27

,悲喜交加,充分感受到了理想与现实的距离,不过没关系,这里介绍一种新的模板匹配算法,主要是基于图像边缘梯度,它对图像光照与像素迁移都有很强的抗干扰能力,据说Halcon的模板匹
2023-12-07 10:56
在深度相机的主流技术方案Structure Light,ToF,Stereo Dual)中,主动双目成像方案可以基于低成本的硬件,获得高分辨率、高精度的深度图像,但是立体匹配算法(stereo
2023-07-04 11:33
我们都知道特征检测和匹配是计算机视觉领域中的重要任务,它们在许多应用中发挥着关键作用,比如SLAM、SFM、AR、VR等许多算法都需要稳定精确的特征检测和
2023-06-16 16:48

在一对图像中寻找匹配的像素是具有各种应用的基本计算机视觉任务。由于光流估计和局部特征匹配等不同任务的特定要求,以前的工作主要分为稠密匹配和稀疏
2023-11-27 11:32

视觉匹配是关键计算机视觉任务中的关键步骤,包括摄像机定位、图像配准和运动结构。目前最有效的匹配关键点的技术包括使用经过学习的稀疏或密集匹配器,这需要成对的图像。这些神经网络对两幅图像的
2024-10-28 09:57