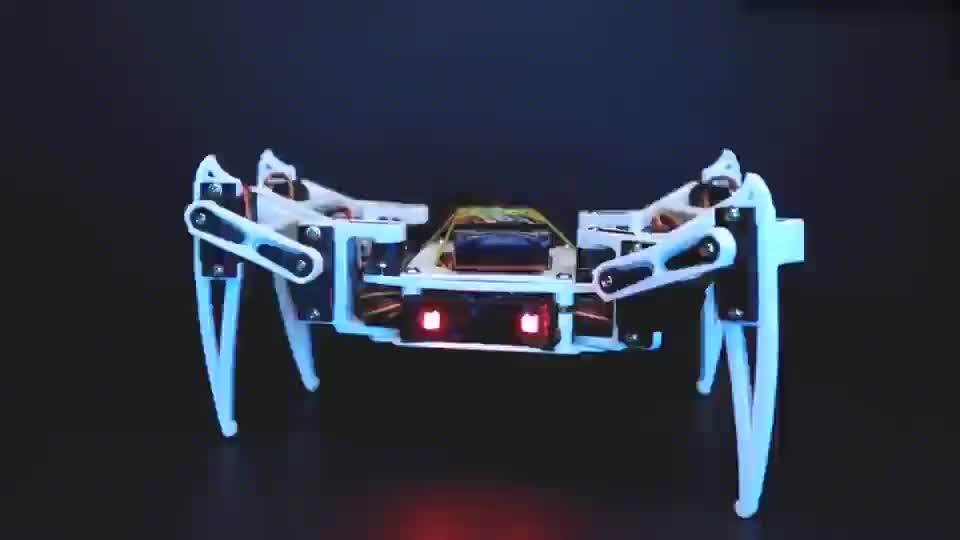
描述“迈尔斯”开源四足蜘蛛机器人它使用 8 个 SG90 / MG90 伺服电机 作为腿部的执行器,由一个定制的 PCB 组成,用于为伺服系统供电和控制,而 Arduino Nano.PCB 具有
2022-08-09 06:30
下载代码并使用PyCharm将其打开,运行代码,您将看到屏幕上的一个精美的3D蜘蛛机器人,您可以使用鼠标和中间按钮进行放大/缩小,使用右键进行旋转。
2019-11-13 17:00
分享一个四足蜘蛛机器人- 开题进入大学以来,学习单片机已经很长时间了。之前都是在开发板上学习各种外设,做各种实验,一直也都没正经的做过什么项目。刚好临近毕业,需要做毕业设计,我感觉这是一个很好的机会
2021-12-06 06:04

电子发烧友网站提供《带Arduino的四足蜘蛛机器人.zip》资料免费下载
2023-02-08 15:55
电子发烧友网站提供《迈尔斯开源四足蜘蛛机器人.zip》资料免费下载
2022-07-26 10:12
★★★DIY6足仿生蜘蛛机器人 51单片机 WIFI控制★★★网上的6足机器人都是用stm32或AVR单片机做的,可大多数单片机新手只会51单片机,所以就试着用51单片机做个,没想到还真成了,做的好不好大家看看吧。第
2016-04-15 15:54
现在我们已经准备好运行机器人了,但是我们需要先设置关节角度,因此请上传设置代码,该代码可让您将每个伺服器放入通过将伺服器以90度角安装在正确的位置,请不要忘记连接7V DC电池以运行机器人。
2019-09-24 10:37
用的是Hi3861+pca9685+电源模块
2020-11-24 16:09