
相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个坐标系之间的装换关系。
2023-07-03 10:30
因为相机成像的模型比较复杂,所以依赖于一张图像来标定相机是不可靠的。但是我们可以把世界坐标固定在标定板上,通过转动和平移标定板来得到多幅不同的图像。
2022-11-22 10:34

。由于两种曝光模式的工作原理不同(全局曝光会一次性曝光所有像素,卷帘曝光一次只曝光一行像素)。如果项目中有拍摄高速运动物体的需求,都建议使用全局曝光的相机。 2、降低相机
2023-05-30 10:15
目前市场上共有两种类型的采集方法可用于采集物体的图像:面阵扫描和线扫描。最常见的2D机器视觉系统使用面阵扫描相机,此类相机在采集图像时需要曝光完整的像素矩阵。相比之下,线扫描相
2020-09-24 10:14
相机分辨率选择的过程基本为:1、确定精度要求最高的部分需要的像素数;2、计算整个图像需要的像素数;3、确定合适的分辨率;然后就能够得到所需相机的分辨率了,分辨率是一个
2019-05-20 11:10
线扫相机的原理:线扫相机一般一次只拍摄一条线(线宽通常是1个像素),在机构运动的过程中,线扫相机不断地拍摄线,于是 “聚线成面” ,这就是线扫
2023-01-17 16:36

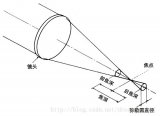
像素中心之间的距离有几个至十几个微米不等。为了最大限度利用图像信息来提高分辨率,有人提出了亚像素概念。意思是说,在两个物理像素之间还有像素,称之为亚
2023-07-31 15:53

目前市场上共有两种类型的采集方法可用于采集物体的图像:面阵扫描和线扫描。最常见的2D机器视觉系统使用面阵扫描相机,此类相机在采集图像时需要曝光完整的像素矩阵。相比之下,线扫描相
2023-06-26 10:29
灰度是描述灰度图像内容的最直接的视觉特征。它指黑白图像中点的颜色深度,范围一般从0到255,白色为255,黑色为0,故黑白图像也称灰度图像。灰度图像矩阵元素的取值通常为[0,255],因此其数据类型一般为8位无符号整数,这就是人们通常所说的256级灰度。
2022-03-21 13:37
线阵相机,是采用线阵图像传感器的相机。面阵相机是一种可以一次性的获取图像并能及时进行图像采集的相机它们都是工业相机,那么
2022-01-29 16:02