现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。
2019-03-17 09:23

基于MSP430F149单片机设计了一种三自由度转台系统。在该系统中,利用旋转编码器的信息反馈,通过对电机的闭环控制,使三自由度转台能够模拟飞机的飞行姿态。
2011-09-26 13:58
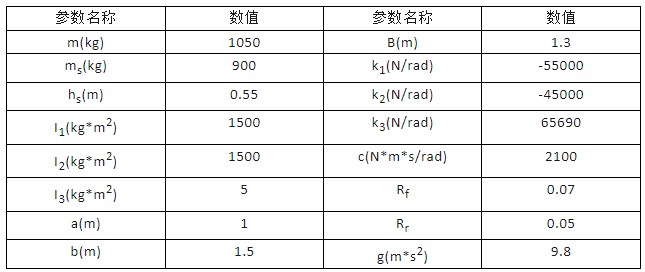
本期采用Simulink建立汽车2自由度动力学模型。为了便于掌握汽车稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2023-06-28 16:39
工业机器人自由度一般分为4个自由度,或者6个自由度,关节机器人主要是模仿人的手臂进行设计的。
2023-03-16 12:20
基于三维模型的视觉定位通过在查询图像和三维模型间建立 2D-3D 对应关系,估计相机六自由度的位姿。传统的视觉定位方法通常采用人工设计的局部特征,如 SIFT,来实现 2D-3D 匹配,并结合图像检索技术,将匹配范围限制在查询图像的可见区域,以适应大规模场景的需求。
2023-04-20 10:07

现在用的最多的工业机器人,一般都是六轴的,但是最近推出来的人机协作机械臂,却有7个自由度,一直想不明白为什么。直到最近看到知乎上的一个问题:人的手臂(腕关节到肩关节)有几个自由度?才发现,原来7个
2018-02-07 15:40
机器人机构能够独立运动的关节数目,称为机器人机构的运动自由度,简称自由度(Degree of Freedom),由DOF简写表示。
2018-01-17 10:03
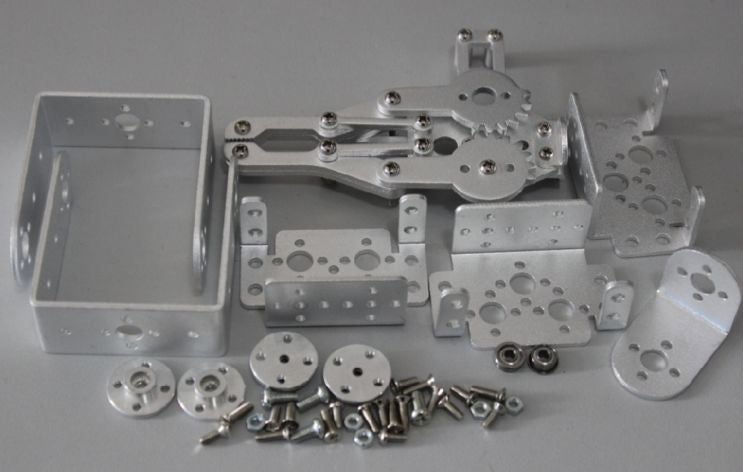
我希望这些照片对您有所帮助组装您的4自由度机械臂。
2019-10-09 11:52
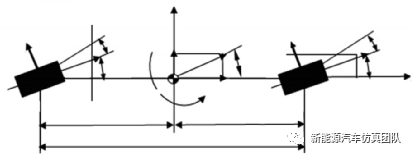
线性2自由度汽车模型是汽车操纵稳定性分析中最简单、最典型的模型。
2023-06-28 16:52
六自由度电磁跟踪系统根据电磁感应的原理来计算出目标的六个自由度参数,从而唯一确定目标的位置和姿态。怎样由接收到的模拟信号计算得到目标的位置和姿态参数是影响整个系统性能的关键所在。在一些早期的产品中对感应天线接收信号的处理主要采用模拟电路和单
2011-01-25 00:11