
针对典型的工业过程控制对象,提出了一种二自由度内模控制方法,此方法可以使系统同时具有良好的目标值跟踪特性、干扰抑制特性和鲁棒性,改进了常规内模控制的不足,而且控制算法简
2011-05-23 15:12
19自由度机器人_动作例程,感兴趣的小伙伴们可以瞧一瞧。
2016-11-17 18:35
针对二自由度PID 控制器参数整定困难的问题,提出了一种基于单亲遗传算法的二自由度参数整定方法。运用该算法分别对单自由度PID 控制器和二自由度控制器进行了整定,并与
2009-12-26 13:56
SimTec仿真技术公司总部位于德国北部Braunschweig,是一家拥有超过20年历史的国际领先的运动仿真系统制造公司。 SimTec专门电液伺服液多自由度运动模拟系统及运动数据采集系统的的软硬
2011-04-07 16:34
分析了欠驱动两自由度机械臂主、被动关节间的动力学耦合特性,指出了被动关节处于不同位置时耦合特性的差异。针对主、被动关节间的动力学耦合特性及其差异,提出了两种
2009-08-04 15:51

为了使六自由度机械臂完成特定的动作, 需要设计计算相应的指令序列. 首先计算了机械臂位姿与指尖位置之间的关系公式, 然后针对机械臂的到达问题、沿曲线运动问题和避障问题, 分别
2012-02-17 16:55
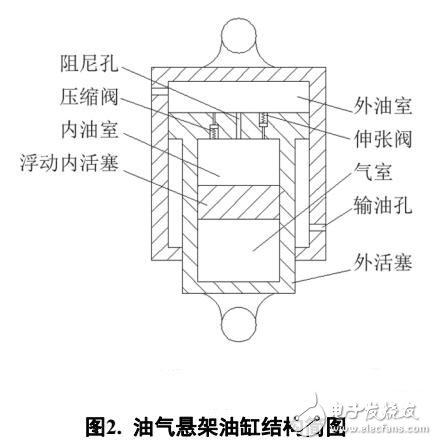
建立了二自由度汽车油气悬架系统模型,分析了油气悬架和车身模型的非线性特性。运用AMEsim仿真软件,通过模型对不同的激振频率的时域和频谱响应分析,验证了油气悬架非线性振动模型的正确性。仿真结果表明,系统产生了接近激振频率分数(或整数倍)的频率分量,造成亚谐波(或超谐波)共振,导致系统振动不稳定。
2018-01-16 16:49
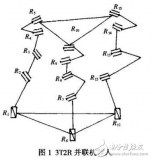
理想的少自由度并联机构的所有分支最好具有完全相同的结构,保持结构的对称,以满足各向同性的要求。以单开链支路为单元,提出了一种新型的对称的少自由度的并联机器人机构。研究结果表明,该机构的运动平台具有
2017-10-23 16:24

ADIS16485:战术级六自由度惯性传感器数据表
2021-05-23 17:32
ADIS16385:六自由度惯性传感器报废数据表
2021-05-24 09:14