
仿真中模糊自整定控制器中KP,KI,KD三个待整定参数的初始值均为零。为使输入信号与模糊自整定控制器的论域相同,引入了幅
2020-04-06 10:44
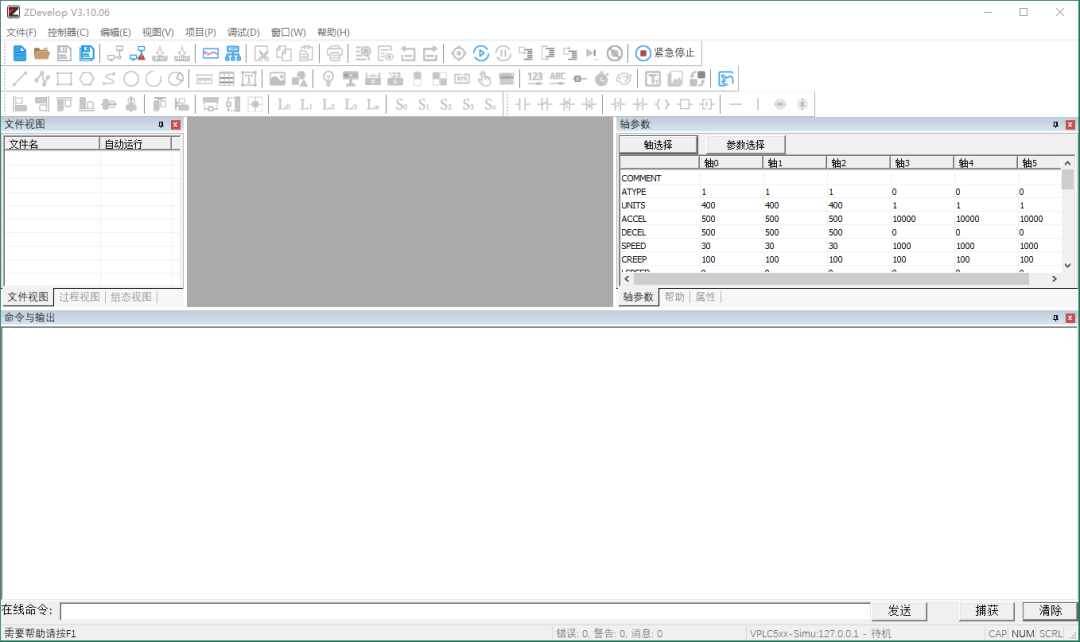
其实不同品牌运动控制卡对仿真的支持是不一样的,有些品牌不支持,有的品牌则支持,今天跟大家分享一下,基于正运动Zmotion运动控制卡,来实现
2023-02-22 15:54
Matlab航迹规划仿真—A*算法
2022-11-14 10:54

前两天,课程群的号友,说他用SystemVue,来仿真链路的级联参数,说遇到问题了。
2023-10-27 15:57
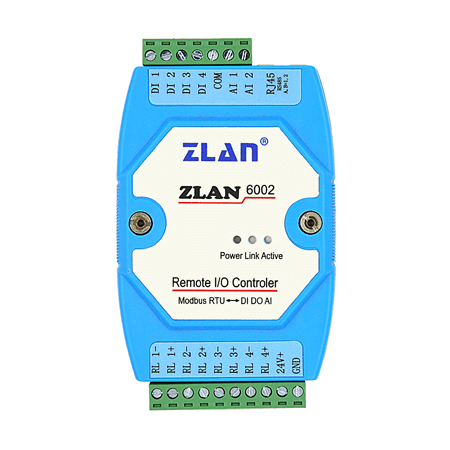
RS485远程DI、DO、AI模块 通过RS485的Modubs RTU协议进行控制 支持4路继电器输出、4
2019-11-08 19:05
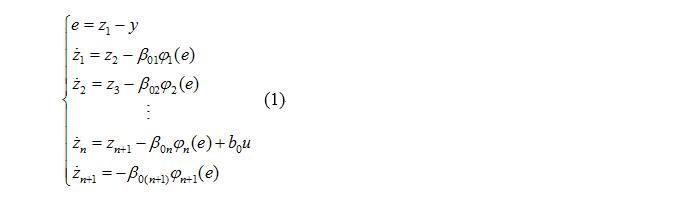
本文主要详解基于自抗扰控制的双环伺服系统,分别从ADRC抗干扰机理、伺服系统自抗扰控制、仿真研究以及实验结果四个方面详细
2018-06-01 14:44
调度算法效果评测上有五个挑战,一是效率低,一个迭代平均效果评估回收时间需要两周左右。二是不受控,我们无法控制线下运维的执行情况。
2022-09-23 12:00

一. 简介 相信大家对于PID控制算法,都不感到陌生了,平衡车就是靠它平衡起来的,还有飞控的平衡算法也是它,以及FOC中的闭环控制中也是用的它,它不仅简单,而且易于理解
2023-07-20 09:23

在ADS中搭建好S参数无源链路原理图,并设置好各项参数,尤其是S仿真器频率、起始频率和步长。
2019-01-01 09:26
