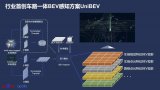
BEV自动驾驶感知好比一个从高处统观全局的“上帝视角”,将三维环境信息投影到二维平面,以俯视视角展示环境中的物体和地形。在路径规划、障碍物检测、自动驾驶决策等方面,BEV感知
2023-08-23 14:51
本帖最后由 逸興遄飛 于 2016-4-17 15:37 编辑 cannon入門之Jlink調試總結:昨晚發的帖子,好像還在審覈,現在有壇友問我是怎麼解決的,那就不怕幸苦,再碼字一邊。1、瞭解
2016-04-17 15:26

云(Pseudo lidar),可以模拟激光雷达的测距功能,辅助3D目标检测等视觉定位任务,而且比激光雷达更加稠密。这是自动驾驶视觉感知的一个热门研究方向。 苹果姐:基于PackNet的演进——丰田研究
2023-06-07 11:39
由車輛完全自主自動化駕駛。目前 SAE 採用J3016 標準(J3016
2019-09-17 09:05
BEV感知的二维特征点 首先来简单介绍一下什么是BEV感知。 BEV感知
2023-11-14 11:37
的模型,此模型能夠簡單快速且有效率的去完成診斷的動作,同時也夠做元件在容錯範圍的正常診斷以及破壞性及參數性故障的診斷,對於不同電路的診斷也能夠容易去設計修改。以下是本論文
2009-08-20 18:58

BEV即Bird's Eye View(鸟瞰视图)是一种从空中俯视场景的视角。由多张不同视角采集的图像通过不同的空间转换方式形成,如下图所示,左侧为6张不同位置的相机采集的图像,右侧为转换的BEV图像。
2024-01-02 14:13
./oschina_soft/pllua-ng.zip
2022-06-24 10:59
`上週看到自己通過了申請,很是激動,端午過後,天天關注前臺的快遞,看到了那麼大的一個快遞,還是很激動的,回宿來拆開看了,簡單總結
2016-06-15 23:03