在计算机芯片的世界中,许多参数都是 “ 越大越好 ”。比如更多的内核、更高的 GHz 主频、以及更大的浮点运算能力。不同的是,在工艺制程上,整个行业都在极力向更微小的目标前进。从 10nm 到 7nm,直至 5nm 和更小的尺度。
2019-12-02 16:41

目标检测共有以下四个核心问题:(1)目标可能出现在图像的任何位置;(2)目标有各种不同的大小;(3)目标有各种不同的形状;(4)光照、遮挡等因素的干扰。如图2-1所示,
2023-05-22 09:43
在计算机视觉领域,目标检测一直是研究的热点和难点之一。特别是在小目标检测方面,由于小目标在图像中所占比例小、特征不明显,使得检测难度显著增加。随着深度学习技术的快速发展,尤其是卷积神经网络(CNN
2024-07-04 17:25
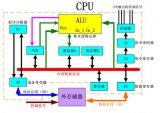
人工智能芯片目前有两种发展路径:一种是延续传统计算架构,加速硬件计算能力,主要以 3 种类型的芯片为代表,即 GPU、 FPGA、 ASIC,但CPU依旧发挥着不可替代的作用;另一种是颠覆经典的冯·诺依曼计算架构,采用类脑神经结构来提升计算能力,以IBM True
2019-01-05 09:15
目前主流的目标跟踪算法都是基于Tracking-by-Detecton策略,即基于目标检测的结果来进行目标跟踪。DeepSORT运用的就是这个策略,上面的视频是DeepSORT对人群进行跟踪的结果,每个bbox左上角
2023-08-07 15:37
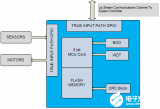
人工智能(AI)和机器学习(ML)技术在自主性日益增强的系统中的应用越来越普遍,这将提高各行各业对更智能的安全系统的要求。
2023-07-08 11:11
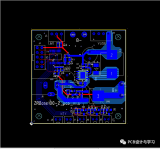
机器人自主充电座PCB和原理图
2018-05-13 10:11
对象跟踪问题一直是计算机视觉的热点任务之一,简单的可以分为单目标跟踪与多目标跟踪,最常见的目标跟踪算法都是基于检测的跟踪算法,首先发现然后标记,好的跟踪算法必须具备REID的能力。今天小编斗胆给大家推荐一个结合传统算
2022-09-14 16:20
红外单帧弱小目标检测算法主要通过图像预处理突出小目标同时抑制背景噪声干扰,之后采用阈值分割提取疑似目标,最后根据特征信息进行目标确认。
2022-08-04 17:20
自主式移动机器人系统是指根据指令任务及环境信息进行自主路径规划,并且在任务执行过程中不断采集局部环境信息,做出决策,从而实现安全行驶并准确到达目标地点的智能系统。本文以LPC2119为控制核心,介绍了一种轮式移动
2016-05-30 14:54