
作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系统的学习了一下,传感器的外参
2023-11-20 15:45

作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系统的学习了一下,传感器的外参
2023-11-20 15:34
来自CMU Robotics Institute, 已知最早3D Laser与相机标定的工作(2005年),基于matlab的图形用户界面,进行激光雷达相机外参标定。
2022-11-10 14:59

为了解决外参逐渐漂移的问题,提出了一种基于线的方法,可以在真实场景中实现激光雷达和相机的自动在线外参标定。首先,从点云和图像中提取和过滤线特征。然后,利用自适应优化方法
2023-08-31 10:50
相机标定中所要确定的几何模型参数分为内参和外参两种类型。相机内参的作用是确定相机从三维空间到二维图像的投影关系。相机外参
2022-10-12 16:04
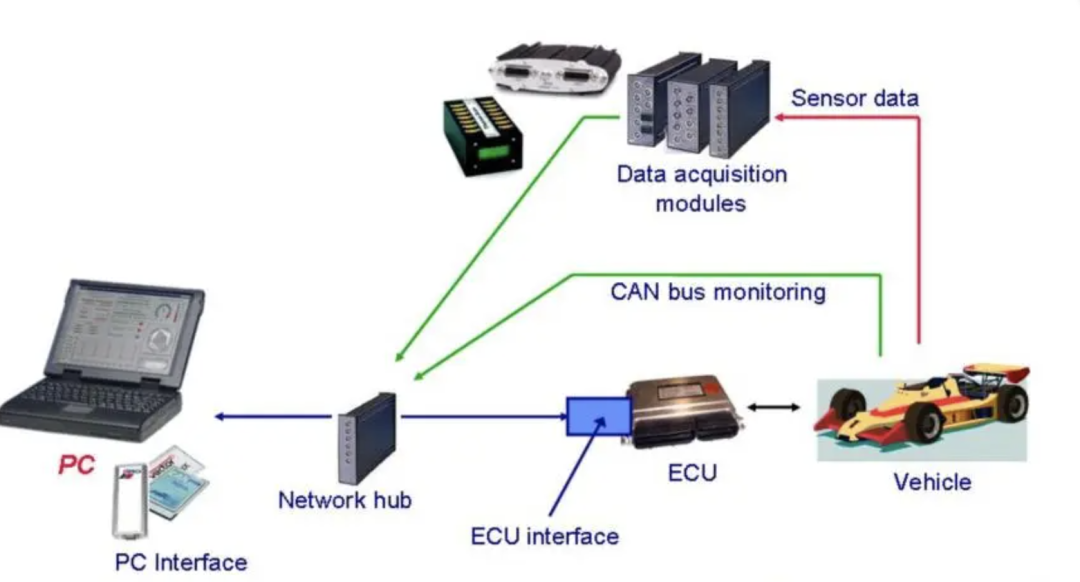
标定概述 我们先看一张图,做过调试的同学额应该很熟悉,出问题了,要实车调试,我们带着电脑和canoe下去调试了。只不过这张图是讲标定的,我们通过can或者以太网接口卡,把标定参数刷到我的Ecu中
2023-07-30 16:15
该功能包提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。
2022-10-28 10:35

包含了计算相机内参,获得标定数据,优化计算外参和雷达相机融合应用相关的代码。 本方案中使用了标定板角点作为标定目标物,由
2023-11-28 11:09
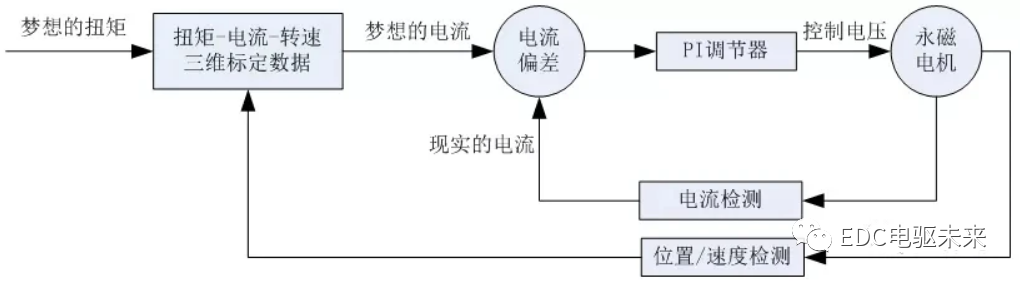
假设已经实现了电机控制,后续的电机标定大抵上分成两类,一类是效率标定,一类是外特性标定。前者目标是以提升在各工况下的系统效率。假设你了解交直轴变换,那么效率
2023-08-04 10:26
使用视觉进行目标检测,将检测结果2D bounding box坐标信息投影到点云里面获得3D bounding boxx坐标,这里面需要将摄像头和激光雷达进行联合标定,即获取二者坐标系的空间转换关系。
2023-04-09 10:47