
作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系统的学习了一下,传感器的外参
2023-11-20 15:45

作为无人车以及智能机器人而言,在装配过程中各个传感器之间的外参标定一直是比较头疼的问题。这里作者也系统的学习了一下,传感器的外参
2023-11-20 15:34
来自CMU Robotics Institute, 已知最早3D Laser与相机标定的工作(2005年),基于matlab的图形用户界面,进行激光雷达相机外参标定。
2022-11-10 14:59
lidar_camera_calibration项目——激光雷达和相机联合标定
2019-04-12 09:27
针对目前Kinect传感器人工标定方法误差大、速度慢等问题,提出一种自动、快速的Kinect传感器外参标定方法。首先,根据彩色图像提取的角点,生成彩色图像的角点集合;其
2017-11-29 14:25

为了解决外参逐渐漂移的问题,提出了一种基于线的方法,可以在真实场景中实现激光雷达和相机的自动在线外参标定。首先,从点云和图像中提取和过滤线特征。然后,利用自适应优化方法
2023-08-31 10:50
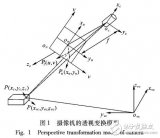
梯形标定板上的扫描信息,获取激光雷达安装的俯仰角和安装高度;然后,通过梯形标定板上的黑白棋盘格标定出摄像机相对于车体的外参数;其次,结合激光雷达数据点与图像像素坐标之间
2017-11-30 16:23

针对自由双目立体视觉中由于摄像机旋转导致的摄像机外参数变化的问题,提出一种基于旋转轴标定的动态外参数获取方法。在多个不同位置,立体标定得到多组旋转平移矩阵,利用最小二乘
2017-11-25 11:27
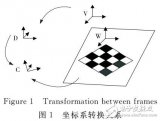
相机标定中所要确定的几何模型参数分为内参和外参两种类型。相机内参的作用是确定相机从三维空间到二维图像的投影关系。相机外参
2022-10-12 16:04
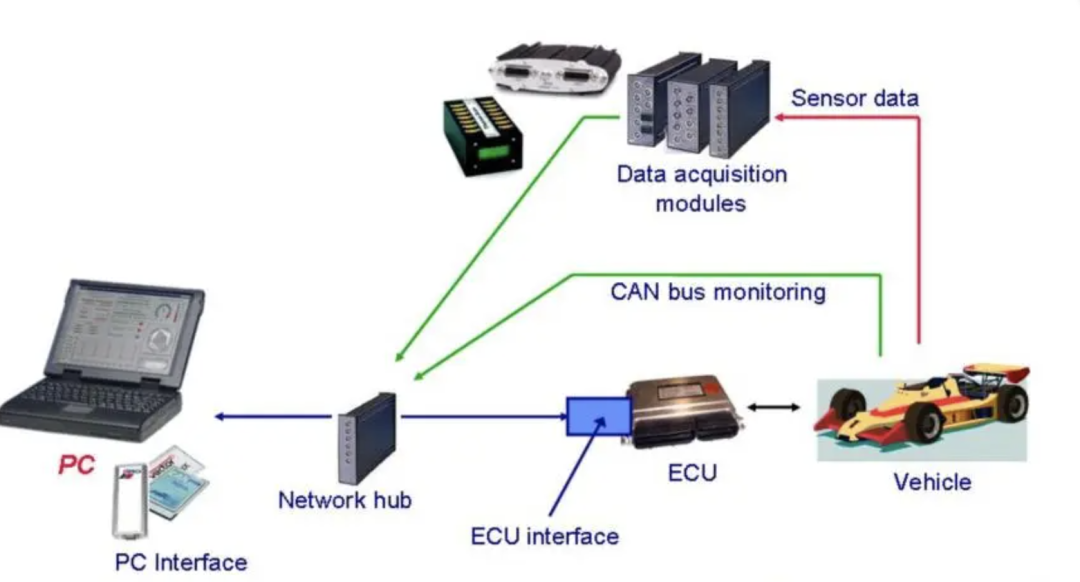
标定概述 我们先看一张图,做过调试的同学额应该很熟悉,出问题了,要实车调试,我们带着电脑和canoe下去调试了。只不过这张图是讲标定的,我们通过can或者以太网接口卡,把标定参数刷到我的Ecu中
2023-07-30 16:15