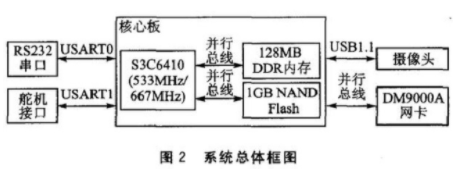
在武术擂台技术挑战赛中,机器人要采集目标的位置信息。由于I/O、A/D转换的有效检测距离有限,机器人采用摄像头采集场地上的图像信息,根据目标的颜色进行识别、定位。当检测到目标位置以后控制舵机自主运动向目标靠拢,完成自我介绍、抱绣球等动作。所设计的
2021-04-13 15:22

短U型支架 + 多功能铝合金舵机支架 +舵机 + 杯士轴承即可组合成云台,机械手,机器人关节,仿生机器人和类人机器人。
2019-12-04 14:14

长U型支架+多功能铝合金舵机支架+舵机+ 杯士轴承即可组合成云台,机械手,机器人关节,仿生机器人和类人机器人。
2019-11-18 09:23
十多年前“诡异谷”的理论制约了类人机器人的发展,但随着科技的发展,人们再次把关注的眼光投向了“更像人类的机器人”身上,机器人博览会上的saya已经到了以假乱真的地步,制
2020-05-03 11:25
仿人机器人的研究最早可以追溯到上世纪中期,先是模拟人的手臂功能,到后来才开始对双足机器人的研究。
2018-07-12 11:06
在这几年,各大工业机器人制造商,目前都热衷与人机协作,ABB的“玉米”,FANUC的“绿手臂”,KUKA的“伊娃”等等,在人机协作走的比较前的也就数UR了,我们来简单介绍下UR的黑科技,来看下如何用手来教训
2018-01-11 18:14
为研究双足步态,弗吉尼亚理工大学机器人和机械实验室(RoMela)设计了最初的智能型动态拟人机器人(DARwIn)。在RoMela,我们在硬件上测 试了步态研究的设想和理论。我们决定用RoboCup这一国际性机器人足
2018-08-24 14:09
机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。工业机器人控制技术的主要任务就是控制工业机器人在工作空间
2019-10-15 14:50
协作机器人只是整个工业机器人产业链中一个非常重要的细分类别,有它独特的优势,但缺点也很明显:为了控制力和碰撞能力,协作机器人的运行速度比较慢,通常只有传统机器人的三分之
2019-07-07 09:47
机器人的研发是为了协助或取代人类进行危险的工作,目前大部分的机器人都还是硬邦邦的“硬汉”形象。人们也在拓展自己的想象和创造力,去开发像“大白”一样软萌的机器人。这种利用柔软材料来制作的
2018-05-17 23:58