
多阶段策略在图像修复任务中被广泛应用,虽然基于Transformer的方法在单图像超分辨率任务中表现出高效率,但在立体超分辨率任务中尚未展现出CNN-based
2023-06-27 11:07

该专利叫做“使用立体图像的自适应车辆增强现实显示器”,它将结合车辆的数据和一个预先制作的三维地图,为乘客提供关于他们周围环境的深层信息。在专利摘要中简要描述了整个概念,即“AR系统利用一个预先生成的三维模型改进AR场景视图中3D图像内容的渲染”,具体的例子是“移动
2018-04-10 15:24

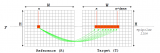
立体匹配是计算机视觉的重要领域,通过给定一对经过校正的图像,计算对应像素之间的位移,即视差。
2023-05-16 09:05
双目立体匹配可划分为四个步骤:匹配代价计算、代价聚合、视差计算和视差优化。
2020-08-31 10:08

的四种灰度变换;使用 MATLAB 自带的 imadjust 函数;以及直方图均衡化和规定化(匹配)处理的图像增强方法。
2018-01-13 21:56
摘要:针对基于双目深度图的室外大规模地图构建计算冗长,而在无人系统的有限算力下,计算效率需求显著的情况,文中提出一种基于双目视觉立体匹配的三维地图构建方法。首先针对由立体匹配算法及原图引入的噪声误差
2022-08-10 11:38
在深度相机的主流技术方案Structure Light,ToF,Stereo Dual)中,主动双目成像方案可以基于低成本的硬件,获得高分辨率、高精度的深度图像,但是立体匹配算法(stereo
2023-07-04 11:33
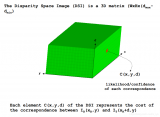
根据Schrstein和Szeliski的总结,双目立体匹配可划分为四个步骤: 匹配代价计算、代价聚合、视差计算和视差优化 。 一 、匹配代价计算 匹配代价计算 的目的
2023-06-28 16:59

图像匹配是各种视觉应用中基本且关键的任务,如同时定位与地图构建( Simultaneous Localization and Mapping,SLAM )和图像检索,这些应用都需要精确的位姿估计。
2024-01-06 10:24

本文提出了一种新的深度立体网络训练框架,可以从使用单个手持相机拍摄的图像序列中生成立体训练数据。这种方法利用了神经渲染解决方案提供的
2023-05-29 10:49