
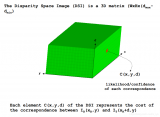
立体匹配是计算机视觉的重要领域,通过给定一对经过校正的图像,计算对应像素之间的位移,即视差。
2023-05-16 09:05
双目立体匹配可划分为四个步骤:匹配代价计算、代价聚合、视差计算和视差优化。
2020-08-31 10:08
根据Schrstein和Szeliski的总结,双目立体匹配可划分为四个步骤: 匹配代价计算、代价聚合、视差计算和视差优化 。 一 、匹配代价计算 匹配代价计算 的目的
2023-06-28 16:59
obj_points、img_points_left和img_points_right分别是存储每个标定图片对应的物理坐标系下的角点坐标、左相机的像素坐标和右相机的像素坐标。这些变量同样在后续的相机标定和立体匹配中用到。
2023-06-08 16:28
事实上,有一些算法的流程比较混合——比如今天我将介绍的一个经典立体匹配算法,它总体来说是局部法的流程,但其中也有少量模块在进行视差优化的过程。
2022-09-07 15:40
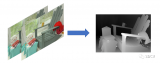
而下面左图是OpenCV的SGBM算法得到的视差图,右边则是通过我今天要介绍的算法处理后的视差图。看了它们后,我想你应该对什么叫做”化腐朽为神奇“有了深刻印象了吧。
2023-01-03 10:59
摘要:针对基于双目深度图的室外大规模地图构建计算冗长,而在无人系统的有限算力下,计算效率需求显著的情况,文中提出一种基于双目视觉立体匹配的三维地图构建方法。首先针对由立体匹配算法及原图引入的噪声误差
2022-08-10 11:38
我们可以明显的看到这个视差图中有一些错误,比如台灯支架断裂了,视差图上部分区域是黑色的,还有背景出现不正常的亮区,同时物体的边界和原图的边界似乎无法对应上(比如台灯灯罩等)。
2022-12-12 10:30

作者在各种数据集上评估了所提出的ELFNet,包括Scene Flow ,KITTI 2012和KITTI 2015 和Middlebury 2014 。此外,作者进行不确定性分析,探讨模型性能和不确定性之间的关系。
2023-09-18 18:29
我们可以利用下图来描述它们的共同点,它们都是由左右两条分支组成了特征提取的网络,提取出来的特征图都会进入到决策模块,该模块负责计算出左右两个Patch对应的两个特征图之间的相似度,所以整个网络分为特征提取和分类决策这两部分。
2023-04-07 10:04