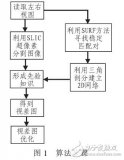
针对目前立体匹配中存在的匹配精度和匹配速度很难兼顾的问题,提出了一种基于稳定特征点和SLIC超像素分割算法的快速立体匹配。利用SURF算法高速有效地提取出特征点进行
2017-11-15 15:26

为保证SAD算法的立体匹配效率,提高匹配精度,提出一种融合边缘特征的立体匹配算法 Edge-gray。通过边缘计算得到边缘特征图,在进行匹配的过程中,根据当前点与领域点
2021-04-29 11:06
提出一种新的基于镜像图像的立体匹配方法,设计一种新的图像采集系统,采集获得物体的镜像图像,利用镜面成像特点,将立体匹配的搜索空间由二维降为可靠的一维。应用彩色
2009-04-15 09:39
立体匹配技术使得通过像点获取景物的距离信息,实现三维立体再现成为可能,是计算机视觉研究中最基本的关键问题之一。本文选择图像的边缘点作为匹配基元,以边缘特征点
2009-06-26 10:29
针对图像全局立体匹配精度高、计算量大的问题,提出基于mean shift图像分割的全局立体匹配方法。首先,通过mean shift算法对图像进行分割,获取图像同质区域数量和区域的标号。在计算匹配代价
2017-11-20 11:50
针对现有的立体匹配算法在精度和速度上不可兼得的现状,提出一种改进的跨尺度代价聚合立体匹配算法。通过强度和梯度算法计算匹配代价,利用引导滤波聚合匹配代价,采用跨尺度模型聚
2021-02-02 14:36
随着立体视觉技术的飞速发展,越来越多的3D相关技术进入了人们的视野,如三维重建、运动估计、VR、AR、白动驾驶等。获取精准的深度信息是这些技术得以正确运用基础。而通过立体匹配获得的视差图则是获取深度
2017-11-02 11:07

为解决现有立体匹配算法对低纹理以及视差不连续区域匹配效果较差的问题,提出一种改进的立体匹配优化算法。在传统自适应权重算法匹配代价的基础上,融合高斯差分图像差分信息,即左
2021-04-29 15:42
针对区域立体匹配算法对光照变化敏感,视差图存在目标和弱纹理区域的错配、边界不平滑等问题,提出一种利用视觉显著性特征改进的快速区域立体匹配算法。该算法先利用显著性检测定位图像主要目标区域;再结合索贝尔
2017-12-28 17:09

立体匹配是对给定的一对立体图像计算视差图的过程。目前许多立体匹配的应用程序需要实时处理,但事实上立体匹配需要经历大规模的计算。幸运的是,无论硬件还是软件方面并行处理技术
2017-10-31 18:46