电子发烧友
6186次浏览

本课题的目的是为设计者提供一种应用于开关电源反馈控制的环路补偿技术的实用综述。
2018-05-29 09:03
为了实现一级倒:芷摆系统自摆起和稳定控制,该文采用了最优控制与PID控制相结合的控制方法。首先,采用BangBang
2012-01-18 15:00

对一维 倒立摆 系统的稳定和起摆进行了深入研究。通过$% 理论对系统进行坐标和输入量的变换,实现了系统的局部线性化,使得倒立摆系统的稳定控制不再需要对数学模型中的非线性
2011-07-06 17:59
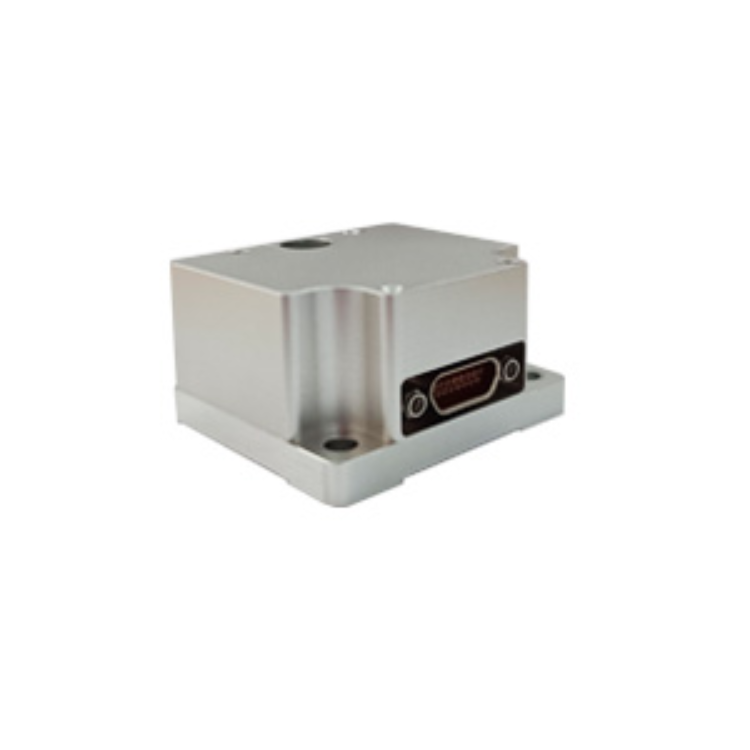
ER-MIMU-07 是世界上最小的六轴MEMS IMU。“惯性测量单元”简称IMU,是一种测量物体三个轴的姿态角(或角速度)和加速度的设备。通过内置的加速度计传感器和陀螺仪,IMU可以从三个方向测量线性加速度和旋转角速度,并通过解算获得载体的姿态、速度和位移信息。特点最小尺寸MEMS:38.6mm x4
2024-12-30 11:03 陕西艾瑞科惯性技术有限公司 企业号
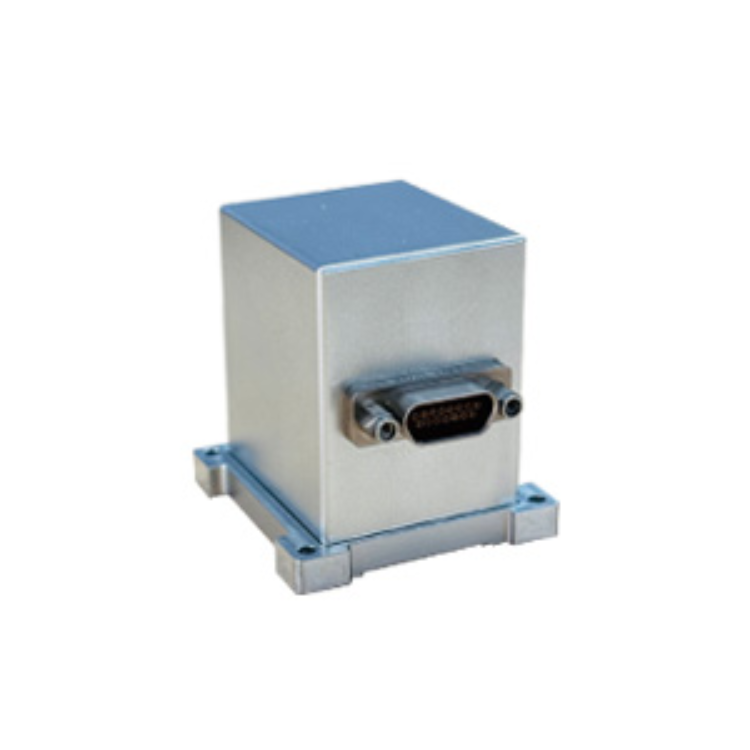
ER-3MG-03/03迷你 高精度导航/稳定控制MEMS陀螺仪体积小、重量轻、结构简单、可靠性好。三轴陀螺仪的最大功能是可以提供判断物体运动
2025-01-08 10:27 陕西艾瑞科惯性技术有限公司 企业号
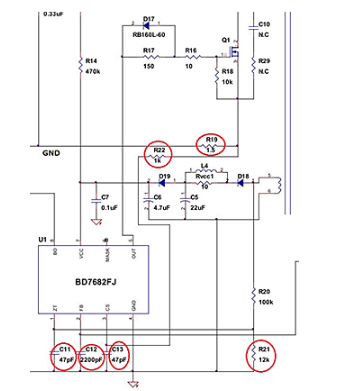
FB(反馈信号输入)引脚通过光电耦合器来监测二次侧输出电压,从而实现稳定控制。ZT(过零电流检测)引脚通过VCC绕组检测开关关断时线圈中积蓄的电力被供应给二次侧输出电容器,且供给电流已达到零。
2020-04-05 10:45

分析了多馈入直流同时换相失败对于电网稳定性的影响和现有的应对策略,提出利用安全稳定控制系统(security and stability control system,SSCS)协调
2018-01-22 16:49
平台; 提出仿人机器人步态稳定控制与关节执行机构的优化; 针对运动中摆动肢体对机器人轴向影响带来的不稳定的问题,设计仿人机器人竖直轴向的角动量补偿算法。本文的主要研究工作如下: 1.搭建基于Matlab和Adams的
2017-10-18 14:31
2016-06-22 09:23

基于cmac的光电探测系统姿态稳定控制技术研究(电源技术在线作业)-基于cmac的光电探测系统姿态稳定控制技术研究
2021-08-31 11:41