
一般来说,操作FANUC机器人时,需要使用FANUC示教器iPendant来对机器人进行示教、做信号配置等。对于熟练使用
2018-05-30 16:09
示教器是进行机器人的手动操纵、程序编写、参数配置以及监控用的手持装置。
2018-08-10 09:42

通过 smartPAD 2 可以对 KR C5 进行全面操作和编程。smartPAD 2 是一台独立的“计算机”,采用基于 Linux 的操作系统。通过 EtherCAT 传输安全操作元件(例如紧急停止和使能开关),并与控制器的系统板建立“远程连接”。
2024-01-10 10:46
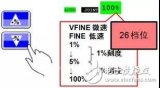
速度倍率是决定机器人运动的实际速度的两个因素之一,以百分符号%来表示。当前的速度倍率在示教器屏幕的右上角显示。速度倍率为100%时,机器人以最快的速度倍率运动。
2018-07-24 10:55
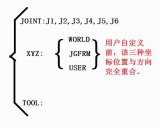
JOINT(关节坐标),JGFRM(手动坐标),WORLD(全局坐标) TOOL(工具坐标),USER(用户坐标)
2018-08-10 09:38
ABB工业机器人常见故障处理 1. 开机示教器显示如下 1) 如果机器人开机,示教
2018-07-06 11:55
FANUC的TP编程语言和示教器的内置编辑器是很好的工具。它们允许新手程序员快速启动和运行。示
2023-02-06 15:42
如果机器人开机,示教器一直显示connecting to the robot controller,如上图(robotware版本是白色界面,提示关键字一样),如何处理?
2018-09-13 11:09

