RFID系统是一种具有广泛应用前景的自动识别系统。基本的射频识别系统由RFID 电子标签( Tag 或者Transponder)和RFID 读写器构成,电子标签的存储容量高达32K bits。根据射频工作的频段和应用场合的不同, RFID 能够识别从几厘米到几十米范围内的电子标签,并且能在运动中实时读取。
2018-08-24 14:23

从水下偏振光场、生物的地磁导航机理以及生物的光磁复合导航机理入手,介绍了水下仿生偏振光导航、仿生地磁导航以及仿生光
2023-12-25 14:26
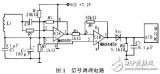
若取N=20,μ0=4π×10-7N/A2,S=O.002 m2,f=20 kHz,Ip=150 mA,a=0.03m,则可估算出感应电动势的幅值E=5 mV,但这只是一个数量级估算,实际上,若线圈偏离载流导线,或载流导线中的激磁电流减小,或采用尺寸更小的检测线圈时,感应电动势的幅值将迅速减小。
2018-07-17 09:14
磁钉导航方案是用磁钉来替代磁条为AGV行驶提供导航信息,相比磁条不容易损坏,相比二维码和色带导航对环境要求低,相比激光成
2018-10-09 17:26

磁导航组是即将举办的2010年第五届全国大学生飞思卡尔杯智能汽车竞赛中首次引入,新赛制规定,在赛道中心线下铺设漆包线,其中通有f=20 kHz,I=100 mA的交变电流,频率为(202)kHz
2017-12-11 01:24
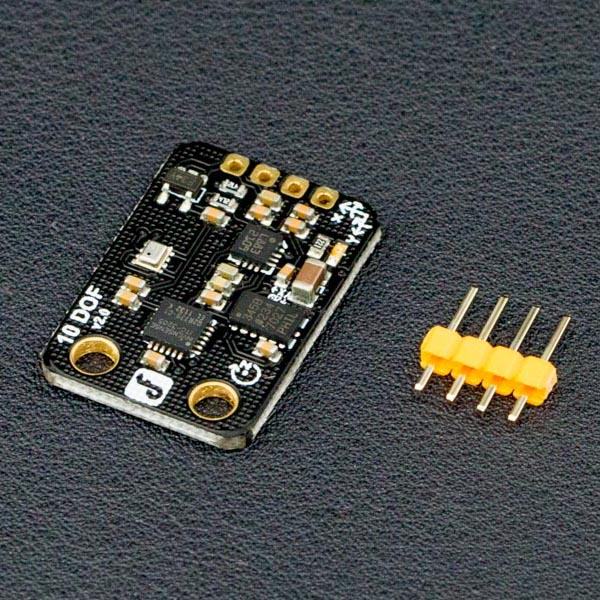
先来说惯性导航元件(IMU),这是一种可以测量飞行器速度、磁向角和重力加速度的电子器件,融合了加速度计、陀螺仪和磁罗盘。现在惯性导航元件已经用在人机交互领域的
2019-11-29 15:55
本文主要介绍了高频磁环的概念及与低频磁环的区别。
2019-11-20 14:25
本文首先对磁粉探伤进行了简单介绍,然后解释了磁粉探伤的原理,并对磁粉探伤进行了分类,最后说明了磁粉探伤的主要特点。
2019-08-08 16:21
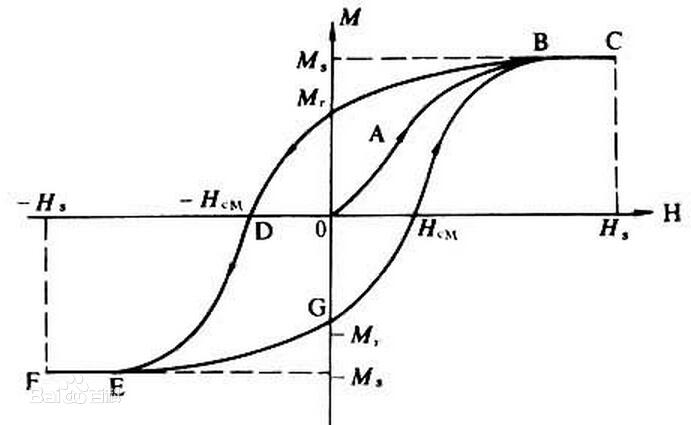
本文首先介绍了磁滞损耗的概念,其次分析了磁滞损耗产生的原因,最后介绍了磁滞损耗的计算方法及介绍了与磁滞回线面积的关系。
2018-05-25 15:20

在现代导航技术领域,惯性导航系统(INS)扮演着至关重要的角色,特别是在与全球导航卫星系统(GNSS)结合使用时,能够提供连续、可靠且高精度的定位、速度和姿态信息。
2025-06-18 17:43 陕西艾瑞科惯性技术有限公司 企业号