因为多传感器的使用会产生大量需要处理的数据,因此通常通过融合算法来对数据进行优化。不同传感器采集到的信息可能相互之间可能会不同甚至是有矛盾,使用融合算法可以帮我们弄懂如何保证系统能够准确处理这些数据,使系统最终做出及时、正确的决策,这非常重要。
2022-03-30 16:29

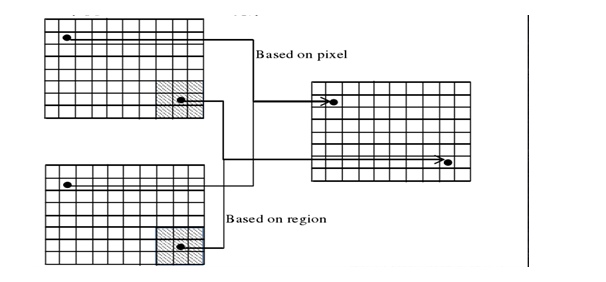
本文从建立伪量测方程的角度,提出了一种异质多传感器的异步量测融合算法,该算法是通过在融合中心建立伪量测方程使各传感器的数据同步,然后利用同步的思想进行处理,最后通过计算机仿真进行了验证。
2019-04-30 14:25

首先要指出的是,Mahony算法假设加速度计测量的加速度完全由重力提供,即物体本体运动产生的加速度可忽略不计。在这一假设下,我们假设当前时刻机体的姿态为,则将重力向量的表示转到机体坐标系下,应该为:,这里表示四元数对应的旋转矩阵:
2023-05-22 09:22
本文主要介绍了利用python来实现小波阈值去噪算法。网上都是利用matlab来实现小波阈值去噪的,小编为有需要的朋友整理了python程序实现去噪
2018-01-10 16:32

本文主要介绍了一种基于新阈值函数的小波阈值去噪算法。在小波阈值去噪法中的两个重要的因素—阈值选取方式和阈值函数,直接决定图像去噪的效果,所以要针对噪声和图像选取合适的阈
2018-01-10 10:12
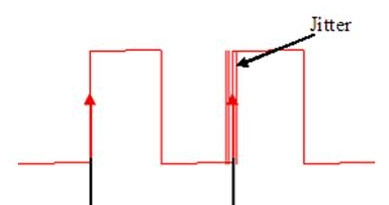
抖动一般定义为信号在某特定时刻相对于其理想位置的短期偏移。这个短期偏移在时域的表现形式为抖动(下文的抖动专指时域抖动),在频域的表现形式为相噪。本文主要探讨下时钟抖动和相
2016-01-18 10:54

昨天,有位号友问我本振相噪计算的问题。
2024-03-17 15:05

本文针对含噪动态源条件下的BSS问题,提出了一种新型在线盲源分离算法,该算法包括两部分:第一部分是基于最小描述长度(Rissanen’s Minimum Descrip
2018-03-12 16:14
相位噪声是时钟、射频频综最为关注的技术指标之一。影响锁相环相噪的因素有很多,比如电源、参考源相噪、VCO自身的相
2014-05-14 11:18
相噪是衡量频谱纯度的一个重要指标,表征的是频率的短期稳定度。单边带相位噪声L(f)来源于相位的波动,单位为 dBc/Hz,传统上定义为特定频偏处1 Hz带宽内的单边带(SSB)功率与载波功率之比,后在IEEE新版本中L(f) 定义更新为随机相位波动φ(t) 单边带
2022-01-19 15:26