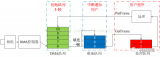
对于工业相机来说,当CMOS或CCD芯片曝光然后将数据转到相机缓存后,这时候DMA会负责将缓存中数据保存到硬盘上指定位置,正好满足
2019-07-27 09:05

)或 CMOS ( Complementary Metal Oxide Semiconductor )芯片的相机。
2020-10-23 11:36

校正后,极点在无穷远处,两个相机的光轴平行。像点在左右图像上的高度一致。这也就是极线校正的目标。校正后做后续的立体匹配时,只需在同一行上搜索左右像平面的匹配点即可,能使
2018-06-29 11:13
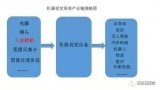
工业相机是机器视觉系统的核心部件,其本质功能完成是将光信号转变成电信号的过程,相比于普通相机来说,具有更高的传输力、抗干扰力以及稳定的成像能力。工业相机根据不同的
2012-08-30 15:12
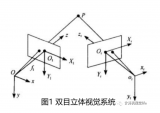
导读 极限校正的实现原理方法以及代码详解。 为什么要做极线校正? 三维重建是通过双目立体匹配实现的如图1,通过匹配空间中点在两个图像中的投影点,再根据三角关系得到P的Z值。 我们双目相机拍摄的时候
2023-07-14 11:03
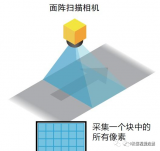
工业相机是机器视觉系统必不可少的核心组件,根据不同的类别有不同的分类标准。按传感器的结构特性分类,可分为面阵相机与线阵相机两种。其中,面阵相机是以面为单位来进行图像采集
2023-12-14 16:55

1、选用全局曝光的相机 工业相机的曝光模式分为全局曝光(Global Shutter)和卷帘曝光(Rolling Shutter)。CCD相机都是全局曝光,CMOS
2023-05-30 10:15
工业相机又俗称摄像机,相比于传统的民用相机(摄像机)而言,它具有高的图像稳定性、高传输能力和高抗干扰能力等,市面上工业相机大多是基于CCD(Charge Coupled Device)或
2019-04-01 10:20
线阵相机,是采用线阵图像传感器的相机。面阵相机是一种可以一次性的获取图像并能及时进行图像采集的相机它们都是工业相机,那么
2022-01-29 16:02
