在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作
2022-06-21 11:12

首先,课程介绍了双目相机标定的基础知识。我了解到双目相机是由两个相机组成的系统,通过同时拍摄目标物体的两个视角来获取三维信息。
2023-07-03 14:25

我们首先介绍下计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系。以及他们之间的关系。然后介绍如何使用张正友相机标定法标定相机。摄像机
2017-12-04 16:56

对于摄像机标定问题已提出了很多方法,摄像机标定的理论问题已得到较好的解决,对摄像机标定的研究来说,当前的研究工作应该集中在如何针对具体的实际应用问题,采用特定的简便、实用、快速、准确的
2023-08-04 12:54

1.文件运行 导入工程 双击运行桌面GraniStudio.exe。 通过引导界面导入相机标定例程,点击导入按钮。 打开相机标定例程所在路径,选中
2025-08-22 17:38
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。
2020-08-28 15:18

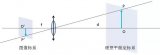
这个逼近的过程就是「相机标定」,我们用简单的数学模型来表达复杂的成像过程,并且求出成像的反过程。标定之后的相机,可以进行三维场景的重建,即深度的感知,这是计算机视觉的一
2023-10-18 17:00
单目相机标定技术适用于被测表面曲率较小且需要获取实际数据的应用场合,比如食品、机械制造以及半导体等。
2023-07-21 11:32

相机标定可以说是计算机视觉/机器视觉的基础,但是初学者不易上手,本文将给读者整理一遍相机标定的逻辑,并在文末回答评论区提出的问题。分为以下内容:
2019-06-01 09:54

OpenCV sample目录下自带两个与相机标定的cpp文件即:calibration.cpp和calibration_artificial.cppcalibration.cpp 是通过用户输入
2017-12-04 17:23