提出了一种新的水下目标运动分析(TMA)的数据融合方法,针对来自同一生源的不同数据测量组合后所得到的TMA估计,在EKF
2011-03-31 15:25
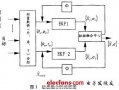
本帖最后由 mr.pengyongche 于 2013-4-30 02:57 编辑 FPGA+DSP 在空中背景下运动目标实时跟踪系统中的应用 摘要:针对电视跟踪系统对飞行目标的检测与跟踪受到速度瓶颈
2012-12-28 11:19
基于labview的三维运动测试分析系统的研究
2013-04-21 19:16
对于ssd对小目标检测效果的思考
2019-09-06 09:24
原理u是四个轮子的角速度,r是轮子半径;开环运动控制各轮子的转速->车身的运动->按理想位姿到达目标位置前半段上面已经解决,现在解决后半段。关于控制律:通过v...
2021-08-30 08:06
本帖最后由 ningkui 于 2012-3-19 14:47 编辑 卡尔曼滤波仿真程序用于匀速运动的目标跟踪% kalman filteringload initial_tracks
2012-03-19 14:47
控制的定义:控制负载的机械运动例子:喷墨打印机负载:墨盒目标:使墨盒在纸面上高速、高精度地来回移动运动控制系统的任务是什么?控制被控对象(单轴/多轴)的运动状态控制输出
2021-09-01 07:06
首先提出几个问题:机器人是怎记住位置的?机器人是怎么到达它的目标点的?到达目标点的速度多快?什么样的姿态到达?机器人能不能识别障碍?带着这些问题我们开始学习第一条指令PTP运动指令
2021-09-01 06:13
多站低频雷达具有全天候全天时的工作能力,可以探测叶簇遮蔽环境下的运动目标,能够满足安防和生态保护领域对丛林目标探测的迫切需求,具有低成本、低硬件复杂度和大范围目标探测
2021-12-20 15:49
对图像定位,边缘检测、图像增强对视频中的某个物体进行跟踪:比如说是飞机,导弹等~附件中的Matlab代码[code]clc;clear;% close all;%%%%%%%%%%%%%%% 读序列图像 %%%%%%%%%%%location = 'D:\ex7\';%文件夹位置count=2; %图像帧数% aviFileName = 'images2AVI.avi';aviObj =avifile('image1.avi');% aviObj =avifile('example.avi');%figHandle = figure;% 多帧循环开始for i=1:countI_origin = imread([location num2str(i) '.bmp']);I= I_origin;k=1;J2=512;J3=0;I1=0;%%%%%%%%%%%%%%%%%%%% 对比度增强 %%%%%%%%%%%%%%%%%%%T=197;%手动选阈值i;III=size(I);for i=1:III(1)% size(I)n=0; flag=0;for j=1:512if I(i,j) >TI(i,j)=255;else if k==1 % k demostrate number n=n+1;if n>15 I1=i;J1=j;k=k+1;n=0;end endif k==2n=n+1; if n>15if J1>j&J2>jI2=i;J2=j;J3=J2+70;end% if J1
2012-03-20 10:47