该系列视频共包括2部分,这是第1部分。本部分介绍MAX32660低功耗Arm® Cortex®-M4 FPU微控制器,器
2018-10-08 01:46

在Adam Taylor玩转MicroZed系列的前期部分中,我们介绍了IP栈的概念。(见Adam Taylor玩转MicroZed系列第79部分:Zynq SoC以太网第
2017-01-13 11:17
在本教程的第1部分中,我们介绍了FPGA,并在嵌入式 Micro的Mojo FPGA上完成了一个简单的入门项目。
2023-03-01 18:24

到目前为止,我们已经研究了ADC的不同类型的电源输入,然后介绍了几种驱动它们的方法。我们主要专注于使用LDO,但我们已经看到这可能并不总是最好的方法。根据系统约束和性能规格,其他拓扑可能更好。在这方面,我们来看看使用
2023-06-30 16:21
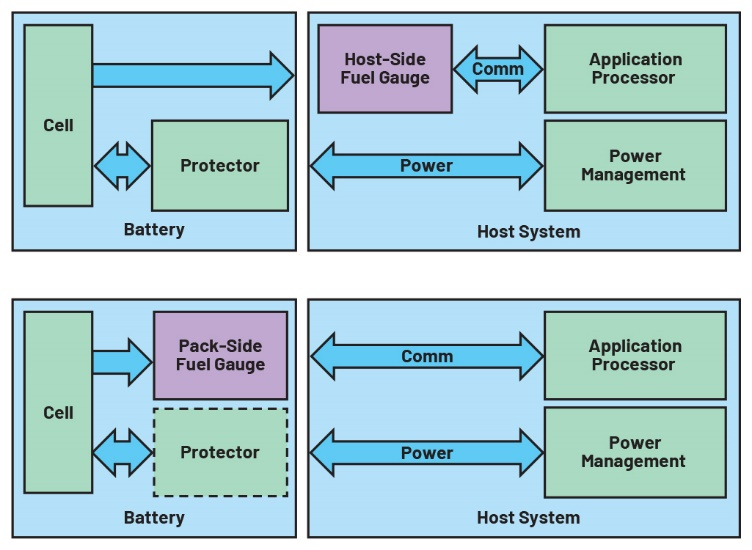
的挑战。第1部分探讨在主机和电池包之间分隔充电器和电量表,以提高系统的灵活性、尽可能降低功耗,并提升用户的总体体验。此外,还介绍设备包含的监测功能,确保实现安全充电和放电。第2
2023-04-19 13:33
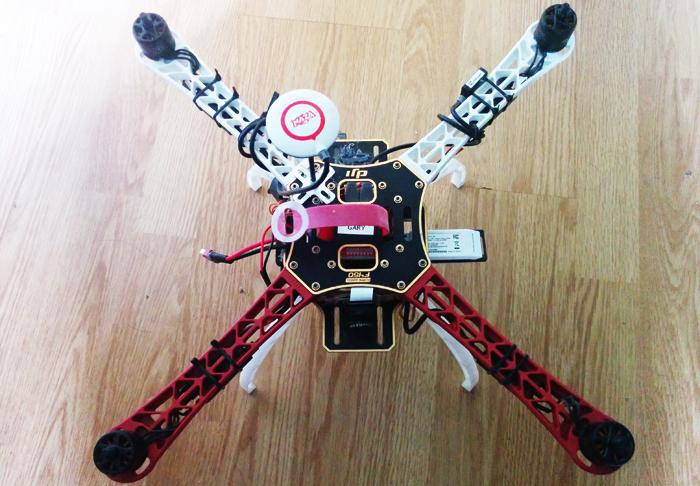
本文是我们Raspberry Pi四轴飞行器系列的最后一部分。有关本教程的其他部分,请参考《DIYRaspberry Pi无人机:机械构造–第1部分》 和 《DIYRa
2023-02-24 17:46
这篇文章来源于DevicePlus.com英语网站的翻译稿。在今天的文章中,我们将提供一个使用Arduino构建电子套件的新方案,本文分为第1部分和第2部分。
2023-02-23 09:44

本例则相反,从单个LDO提供大部分ADC电源输入。现在让我们看看这种方法的一些优点和缺点,也许可以尝试研究一些中间立场。从图中可以看出,这是一种相当简单的方法,使用较少
2023-06-30 16:38
本文是最酷Kickstarter资助的机器人项目系列文章的第2部分。
2023-02-28 15:20
从Serial到Awesome,第2部分:高级代码矢量化和优化
2020-05-31 11:39