
基于C3-370C的GPS定位及轨迹记录仪!
2014-09-29 20:13

服务机器人、巡检机器人、自动驾驶车辆等SLAM应用,需要进行长时间的定位和导航,但是可能会遇到很多光照变化(甚至天气季节变化)、不同视角提取的不同特征、原先场景的目标已经移除等等很多的环境变化问题,如果处理不好的话很容易引发
2023-12-04 10:01
为了预测转弯车辆的轨迹,我们生成了未来的期望速度。我们期望的速度模型由两个三次函数组成,它是用相交几何来生成的。为了解决无法从任何位置创建[ 1 ]的速度模型的问题,我们在地图中建立了速度控制点。速度控制点被定义为速度变得最小的位置。
2018-11-07 15:18

典型的智能车辆通常由感知模块、决策模块、路径规划模块和控制模块组成。车辆自定位是确定车辆的位置和姿态的过程,对上述所有模块都是至关重要的。
2019-02-02 16:40

摘要 高度精确且鲁棒的定位能力对于城市场景中自动驾驶车辆(AVs)至关重要。传统的基于视觉的方法由于光照、天气、视角和外观变化而导致定位丢失。在本文中,我们提出一种新型的视觉语义
2023-05-22 11:42
可用于无线定位的信号:①GPS信号②基站信号③wifi信号,以上三种是最常用的定位方式,此外还有蓝牙/IP/地磁场等手段
2020-03-22 16:05
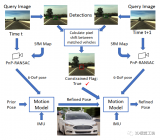
6自由度视觉定位是在给定先验三维地图和查询图像的情况下估计相机绝对姿态的任务。这是一个具有挑战性的研究问题,特别是对于自动驾驶车辆的长期和连续运行,因为与数据库图像相比,查询图像可能会发生显著的外观和视角变化。
2023-07-17 14:30
High D数据集记录在德国科隆附近的六个不同地点。 位置因车道数量和速度限制而异。 记录的数据中包括轿车和卡车。研究者们使用了最先进的计算机视觉算法从记录中提取轨迹,并且使用神经网络方法检测车辆,将其定位在每一帧中
2018-11-06 10:09
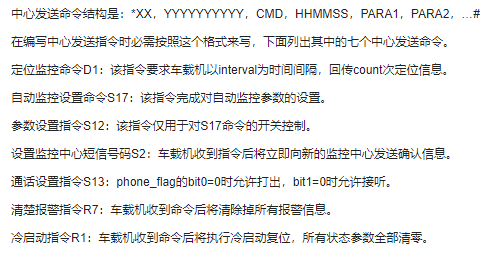
随着汽车在日常生产和生活中起的作用越来越突出,如何实现各类车辆的有效指挥、协调控制和管理已经成为交通运输和安全管理部门面临的一个重要问题。为了满足提高运输效率和安全保障的需要,对车辆定位监控系统的研究也日趋迫切。
2021-03-31 14:47

对于移动机器人,定位技术是保证移动机器人轨迹/运动作业的前提技术,特别是跟踪作业的基础。 与自动驾驶车辆定位不同,小型移动机器人更需要的是
2023-07-10 09:12