后面计算的是特征点主方向上的描述子,计算过程中要将特征点周围像素旋转到主方向上,因此计算一个半径为16的圆的近似坐标,用于后面计算描述子时进行旋转操作.
2022-10-14 09:50
我们习惯从图像中选取比较有代表性的点,然后,在此基础上,讨论相机位姿估计问题,以及这些点的定位问题。 在经典 SLAM 模型中,把它们称为路标,而在视觉 SLAM 中,路标则是指图像特征(Features)。
2024-04-19 11:41
计算机视觉的特征提取算法研究至关重要。在一些算法中,一个高复杂度特征的提取可能能够解决问题(进行目标检测等目的),但这将以处理更多数据,需要更高的处理效果为代价。而颜色特征
2017-11-16 14:12
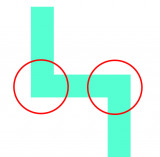
的杆状物提取方法,该方法在线运行,计算量小。该方法直接对由3D 激光雷达扫描产生的Range图像进行计算,避免了对3D 点云的显式处理,并能快速提取每次扫描的杆状物。
2022-10-09 14:48
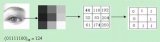
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子;它具有旋转不变性和灰度不变性等显著的优点。它是首先由T. Ojala, M.Pietikäinen, 和 D. Harwood 在1994年提出,用于纹理特征提取
2018-01-30 10:49

方向梯度直方图(Histogram of Oriented Gradient, HOG)特征是一种在计算机视觉和图像处理中用来进行物体检测的特征描述子。它通过计算和统计图像局部区域的梯度方向直方图来
2018-01-22 16:30

基于静态时序分析(STA)的现代设计流程非常依赖标准单元、IO、存储器和定制模块的特征化Liberty模型。高效、准确的库特征提取是全芯片或模块级设计流程的关键步骤之一,因为它能确保所有库单元在所
2024-12-26 11:15
区域和轮廓只包含对分割结果的原始描述,在实际应用中我们还需要从区域或轮廓中确定一个或多个特征量。这些确定的特征量被称为特征。
2023-10-23 14:12
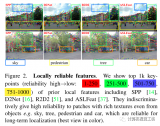
到检测和描述过程中来提取全局可靠的特征,即他们设计了一个语义感知检测器,能够从可靠的区域(如建筑物、交通车道)检测关键点,并隐式地抑制不可靠的区域(如天空、汽车),而不是依赖于显式的语义标签。通过减少对外观变化敏感
2023-06-30 10:49
等问题,采用双线性插值优化视差图;其次通过中值滤波以平滑视差图;最后利用Sobel算子实现对环境物体边缘特征点的提取,并二值化边缘特征图,优化深度值计算环节,在一定程度
2022-08-10 11:38