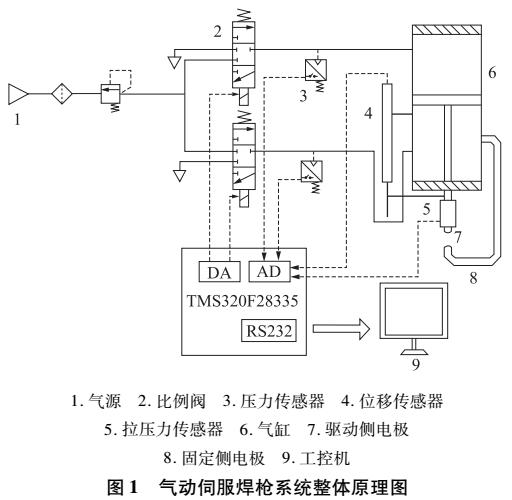
为了提高电阻点焊过程的焊接效率,避免电极接近时过大的冲击力对焊件造成损坏,通过分析焊枪电极的碰撞机理,提出了气动伺服焊枪的软接触指标。利用分段滑模控制的方法对点焊过程的渐进阶段进行控制,同时提出
2018-03-09 11:05
的电极力在焊接过程始终保持优良的稳态性能,确保焊接质量;三是电极力调定速度的高速化,可以提高生产率引。与电动伺服焊枪相比,气动伺服焊枪具有价格低廉、重量轻和维护简便等优点。对于实用的电阻点焊设备,焊接机器人本
2018-03-02 11:10
针对管道焊接机器人焊枪姿态控制问题,提出了一种基于专家系统的焊枪姿态智能控制系统。在基于专家系统的智能控制基础上加入神经网络模糊控制,二者采取并行控制与知识共
2009-06-17 10:10
提出了一种基于TMS320C2407 DSP芯片的管道焊接机器人焊枪摆动器。系统中采用TMS320C2407 DSP芯片作为控制核心,根据遥控器的摆动焊接方式多路开关所设定的摆动焊接方式,控制行走电
2010-08-05 16:11
喷枪在使用之前必须检查它的射吸性能。检查时应接上氧气管、打开乙炔阀和氧气阀(此时乙炔管没有插上喷枪),用手指轻轻接触喷枪的乙炔进气口。如果感到有一股吸力,说明射吸
2009-12-07 16:46
3.1 焊接缺陷分析及处理 机器人焊接采用的是富氩混合气体保护焊,焊接过程中出现的焊接缺陷一般有焊偏、咬边、气孔等几种,具体分析如下: (1)出现焊偏可能为焊接的位置不正确或焊枪寻找时出现问题。这时
2017-11-01 11:09
一、焊接机器人焊接通常出现的一些现象 我们常见机器人焊接一般采用的是二氧化碳气体保护焊,焊接过程中出现的焊接缺陷一般有焊偏、咬边、气孔等几种,具体分析如下: 出现焊偏可能为焊接的位置不正确或焊枪寻找
2017-09-29 13:01
采用LH-300型等离子弧自动焊机,配300硅整流电源。等离子焊枪为自行设计的新型焊枪,采用了同心度可调的可卸式水冷钨极、钨极内缩连续可调等结构,使枪体的密封和调整可靠而
2010-02-01 14:56
技术,是以焊枪为被控对象,通过传感测量技术得出焊枪相对于焊缝中心的位置偏差,经过计算机计算并用焊接机器人实时控制焊枪位置,校正偏差,使得焊枪在焊接过程中始终与焊缝对中,
2017-09-29 19:20
技术,是以焊枪为被控对象,通过传感测量技术得出焊枪相对于焊缝中心的位置偏差,经过计算机计算并用焊接机器人实时控制焊枪位置,校正偏差,使得焊枪在焊接过程中始终与焊缝对中,
2017-10-09 10:14