双目标定和普通相机的标定一样,其标定时不仅标定出两个相机的内参,还要标定出两个相机之间的关系。因此,在进行双目标定时,需要使两个相机对同一标定板进行多次取图,分别标定出各自的内参和相对于标定板的外参,然后便可计算出两相机位置间的关系:
2022-10-10 17:25
PointSet(点集网络)是一个以多层激励机制为核心的新一代高性能公链。以分布式技术为基础,构建一个去中心化网络体系。PointSet Chian应用最新一代区块链技术开发,以点
2018-09-12 09:28
本文作者研究特征提取器 (Feature Extractor),但是视角不仅仅局限在 ConvNets 和 ViT 上。虽然卷积和注意力机制已经被证明了可以用来构建高性能视觉架构,但它们并不是唯一的选择。
2023-01-11 14:31
精配准的模式基本上已经固定为使用ICP算法及其各种变种。ICP算法由Besl and McKay 1992, Method for registration of 3-D shapes文章提出。
2022-11-28 16:12
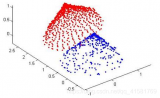
ICP(Iterative Closest Point迭代最近点)算法是一种点集对点集配准方法。如下图所示,PR(红色
2020-09-24 12:43
ICP(Iterative Closest Point迭代最近点)算法是一种基于轮廓特征或点集对点集的
2017-11-16 16:58
Point迭代最近点) ICP(Iterative Closest Point迭代最近点)算法是一种点集对点
2017-02-08 13:34

再次回到图 1 中的红色插框,本文由此得出结论,两个点集只有从大量点云学习到统计规则之后才相连,并观察这一类型的诸多物体,伴随着从椅子延伸到地面的相连、垂直的元素。这启发本文采取一种学习的方法来捕捉
2019-03-29 16:31
Tree Protocol团队成员多来自台大2B实验室(Big Data and Blockchain),已经有落地两年的APP「集点树」,我们利用大数据分析,协助商家顾客管理及行销(CRM),目前约有170,000名会员和800间合作商户,是市场上合作商户数目最
2018-12-24 09:42
包含复杂场景,全场380km,新发布的Apollo点云数据集究竟有多厉害?
2019-07-17 10:35