双目标定和普通相机的标定一样,其标定时不仅标定出两个相机的内参,还要标定出两个相机之间的关系。因此,在进行双目标定时,需要使两个相机对同一标定板进行多次取图,分别标定出各自的内参和相对于标定板的外参,然后便可计算出两相机位置间的关系:
2022-10-10 17:25
PointSet(点集网络)是一个以多层激励机制为核心的新一代高性能公链。以分布式技术为基础,构建一个去中心化网络体系。PointSet Chian应用最新一代区块链技术开发,以点
2018-09-12 09:28
ICP(Iterative Closest Point迭代最近点)算法是一种基于轮廓特征或点集对点集的
2017-11-16 16:58

再次回到图 1 中的红色插框,本文由此得出结论,两个点集只有从大量点云学习到统计规则之后才相连,并观察这一类型的诸多物体,伴随着从椅子延伸到地面的相连、垂直的元素。这启发本文采取一种学习的方法来捕捉
2019-03-29 16:31
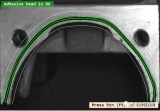
注意,这里halcon的官方例程是给了一个轨迹的点集,我们在实际的检测中,可以使用CAD图纸导入或者手绘路径,完成此步骤。关于CAD图纸导入halcon我会出一期教学博客,写完了把链接贴上来。
2024-03-30 14:40
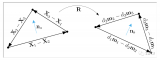
PnP是指根据2D-3D对应关系集合估计相机绝对位姿,集合最小的情况是P3P问题。P3P是将2D-3D对应关系通过相机内参转换为3D-3D对应关系进行求解。给定世界坐标系中的3个3D点以及它们对应的归一化图像点,两个点
2023-08-18 15:40
从物理学角度,我们可以了解到当材料在外力作用下不能产生位移时,它的几何形状和尺寸将发生变化,这种形变称为应变(Strain)。而材料发生形变时其内部产生了大小相等但方向相反的反作用力抵抗外力,把分布内力在一点的集度称为应力(Stress)。
2019-06-18 15:24
理解机器学习中的训练集、验证集和测试集,是掌握机器学习核心概念和流程的重要一步。这三者不仅构成了模型学习与评估的基础框架,还直接关系到模型性能的可靠性和泛化能力。以下是一篇深入探讨这三者概念、作用、选择方法及影响的文
2024-07-10 15:45
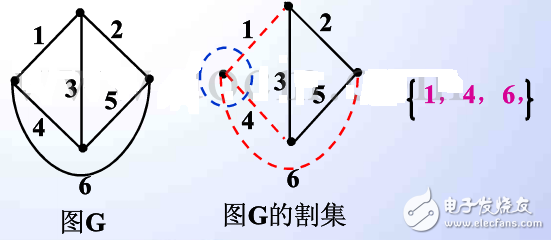
割集是支路的集合,是用一个封闭面把图分成两部分后,穿过这个封闭面的支路的集合,如果移除其中的任一条支路,图又将恢复连通。割集至少包含一条树支,也可以多于一条树支,只包含一条树支的割集叫单树支割
2018-01-18 17:23

thumb指令集是arm指令集的一个子集,是针对代码密度问题而提出的,它具有16位的代码宽度。与等价的32位代码相比较,thumb指令集在保留32位代码优势的同时,大大的节省了系统的存储空间
2017-11-03 17:34