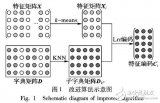
摘 要:点云分割是点云数据理解中的一个关键技术,但传统算法无法进行实时语义分割。近年来深度学习被应用在点
2023-07-20 15:23
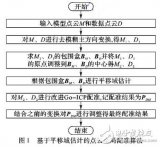
针对传统点云简化算法效率低且处理点数少的缺陷,结合快速成型领域的切片原理顾及特征计算复杂度低的特点,设计并实现了适合千万级海量激光雷达( LiDAR)点云的并行切片简化
2017-12-14 14:08
在百度世界LBS分论坛上推出后广受期待的百度全景,于11月初再度更新。本次更新增加了新的产品形态,定名为激光全景,将通过整合先进的点云测绘技术,大幅提升用户体验。为实现全景视图的3D模型化,百度激光
2017-11-02 15:52
针对三维点云数据模型在去噪光顺中存在不同尺度噪声的问题,提出一种基于噪声分类的双边滤波点云去噪算法。该算法首先将噪声细分为大尺度和小尺度噪声,并使用统计滤波结合半径滤波
2018-01-05 10:51
1. 点云的问题 点云是由3D扫描硬件收集的数据,如FARO的Focus 3D激光扫描仪和Shining 3D的Einscan Pro。捕获3D对象的基本原理是3D扫描
2017-09-27 15:27
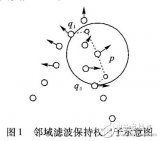
针对目前密度提取方法提取的密度信息不能表现点云局部分布信息和分布随机性的缺陷,提出结合随机分布估计的密度提取方法。该方法采用分块计数法得到每个小分块的密度,结
2009-03-25 08:39
针对三维点云去噪和简化很难用同一参数的问题,提出一种基于扩展的曲面变化度局部离群系数( ESVLOF)的散乱点云去噪与简化的统一算法。通过对ESVLOF定义的分析,给出
2017-11-24 16:50
针对迭代最近点(ICP)算法需要两幅点云具有良好的初始位置,否则易陷入局部最优的问题,提出了一种基于平移域估计的点云全局
2017-12-18 13:50

在逆向工程的数据处理中点云采样是一项关键技术,它可以实现点云精简,从而提高后续的建模效率。文中介绍了基于曲率的点云采样算
2012-07-06 16:59
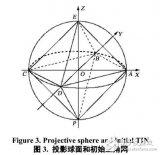
本文主要对点云数据网模型的构建方法进行研究,探讨点云数据构网的方法一一基于球面投影构网算法以及基于空间三角的构网算法。本文首先分析了激光扫描数据的采集原理和数据基本特点
2017-12-20 16:50