点云是在同一空间参考系下表达目标空间分布和目标表面特性的海量点集合,在获取物体表面每个采样点的空间坐标后,得到的是点的集
2022-10-19 16:53
粗配准就是再两个点云还差得十万八千里、完全不清楚两个点云的相对位置关系的
2023-09-25 11:31
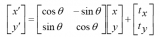
但是这个方法同样也存在缺点,即著名的万向锁(或万向节死锁)(Gimbal Lock)问题:在俯仰角为 时, 第一次旋转与第三次旋转将使用同一个轴,使得系统丢失了一个自由度(由3次旋转变成了2次旋转)。
2023-11-03 12:38

一、摘要 本文介绍了一种基于深度学习的三维点云配准新方法。该架构由三个部分组成: (1)编码器由基于卷积图的描述符组成,该描述符对每个
2023-06-17 09:54
粗配准就是再两个点云还差得十万八千里、完全不清楚两个点云的相对位置关系的
2023-09-21 17:20
总体而言,现有基于对应关系方法的局限性在于两个方面。首先,目前还没有统一、高效、通用的特征学习框架。许多 patch-wise 方法通常采用复杂的网络和复杂的步骤来编码局部 3D patch 的细粒度几何形状。
2023-10-16 17:18
主要利用点云数据的主轴方向进行配准。首先计算两组点云的协方差矩阵,根据协
2023-07-10 15:16
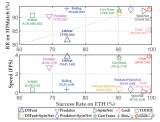
这个工作来自于浙江大学和DAMO academy。在点云配准领域,尽管已经有很多方法被提出来,但是无论是传统方法,还是近年来蓬勃发展的基于深度学习的三维
2023-01-12 17:33

三维场景理解与重建技术主要包含场景点云特征提取、扫描点云配准与融合、场景理解与语义分割、扫描物体
2023-08-08 16:58
待配准图像与原图像相比存在偏移、旋转、比例等空间变换关系,图像配准就是将不同传感器所采集得到的同一场景的多光谱、多波段或同一传感器在不同时相、不同方位、不同条件下(气候
2023-10-24 09:27