
一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM
2021-04-18 10:18
激光雷达分单线和多线这两大类,针对这两类Lidar所使用的算法也不尽相同。 首先单线雷达一般应用在平面运动场景,多线雷达则可以应用于三维运动场景。
2023-03-27 11:02
一般将使用单线雷达建构二维地图的SLAM算法,称为2D Lidar SLAM。大家熟知的2D Lidar SLAM
2023-03-27 11:06
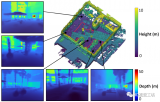
LONER是一个纯LiDAR算法,也没有使用IMU。雷达扫描首先降采样(将为5 Hz),然后用ICP跟踪,并从场景几何中分割出天空。对于建图线程,是使用当前关键帧和随机选择的过去关键帧来更新,并维护一个滑窗来优化。
2023-10-25 10:48

一方面获取传感器采集的各帧数据对应的局部坐标系的位置和姿态是构建地图的关键, 即建图包含了定位问题; 另一方面构建准确的地图又是精确定位的前提, 因此, 定位与建图两者是高度耦合的,可作为一个问题寻找解决方案。
2024-01-18 16:39
在对如何表达无限平面的参数的问题中,文中提到Hesse Form (HF)过度参数化用一个3D向量来表示2DOF且在最小二乘优化中容易遭遇奇异矩阵的问题。球坐标在俯仰角是正负90度的时候会出现表达模糊。四元数来表达平面,他们的联系并不清晰。
2022-09-06 16:00

SLAM算法运行的重要传感器。基于激光雷达的SLAM算法,对激光雷达
2024-11-12 10:30
算法框架和关键模块, 分析阐述了近年来的研究热点问题和未来发展趋势, 梳理了3D激光雷达 SLAM 算法性能的评估标准, 并据此选取目前较为成熟的具有代表性的6种开源
2022-03-21 16:07
4个开关量输入信号组合选取15组区域组(FieldSet)中的任一个作为当前工作区域组,适应复杂多变的应用环境,还可以输出点云数据。 ■镭神激光雷达+SLAM算法可实现的五大功能
2018-11-09 15:59
temi 的核心技术 ROBOX导航系统,通过自主设计的360度激光雷达和SLAM算法,实现厘米级地图构建和空间定位,实现自动导航、自动避障、智能规划路线、自动返回充电等多个功能,引导巡航更智能。
2019-11-08 14:59