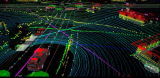
无人平台在大范围环境中 实现自 主定位与导航的能力 需求日 益严苛, 其中 基于激光雷达的同步定位和绘图 技术(SLAM) 是主流的研究方案。 在这项工作中, 本文系统概述了 3D 激光雷达SLAM
2022-03-21 16:07
和摄像头深度融合网络,以改进交通场景下的 3D 语义分割。单个传感器主干提取相机图像和激光雷达点云的特征图。
2022-10-09 15:24
3D 点云广泛应用于 3D 识别技术中。一些特别的应用领域往往对 3D
2022-03-15 11:34
激光雷达的物理原理本质上就是“距离=速度*时间”,通过测量激光信号的信号差和相位差来确定距离。相较于发射电磁波的毫米波雷达和发射机械波的超声波雷达,
2023-07-11 16:21
激光雷达系统需要用精确的时间测量来计算距离和生成高分辨率的3D图像。晶振在激光雷达系统中起着关键作用,主要用于提供稳定的时钟信号和高精度的时间基准。
2024-05-29 11:45
在消费类电子产品领域,工程师可利用激光雷达实现众多功能,如面部识别和3D映射等。尽管激光雷达系统的应用非常广泛而且截然不同,但是 “闪光
2022-11-24 17:56

所谓雷达,就是用电磁波探测目标的电子设备。激光雷达(LightDetectionAndRanging,简称"LiDAR"),顾名思义就是以激光来探测目标的雷
2023-12-18 17:18
在消费类电子产品领域,工程师可利用激光雷达实现众多功能,如面部识别和3D映射等。尽管激光雷达系统的应用非常广泛而且截然不同,但是 “闪光
2022-11-21 14:24
激光雷达因其可靠性目前仍是无人驾驶系统中最重要的传感器,然而,在现实使用中,激光雷达并不是完美的,往往存在点云过于稀疏,甚至丢失部分点的问题,对于不规则的物体表面,使用
2019-01-21 16:06

基于点云的3D障碍物检测 主要有以下步骤: 点云数据的处理 基于点
2023-06-26 10:22