自动驾驶决策算法十分重要。扩大FOV的方法有很多种,其中之一就是利用机械扫描,使用电机帮助实现360度FOV。无刷直流 (BLDC) 电机可以实现此目标,且高效低噪,因此广受欢迎。 图1展示了
2022-06-30 17:01
电子发烧友网报道(文/周凯扬)在激光雷达市场,除了冲击车规、低成本和快速量产外,追求更大的视场角、分辨率和探测距离也是比较常见的竞争方向。靠机械结构与电机旋转的机械激光雷达无疑视场角最广、精度最高
2023-02-03 02:08
激光雷达的扫描方式主要有哪些? 激光雷达是一种利用激光束进行反射和时间测量得出目标距离和位置信息的设备,在无人驾驶、自动驾驶和地图绘制等领域有着广泛的应用。
2023-08-23 16:14
通常激光雷达可以分为两大类:机械式激光雷达和固态激光雷达。机械式激光雷达采用机械旋转部件作为光束扫描的实现方式,可以实现
2023-02-21 11:18
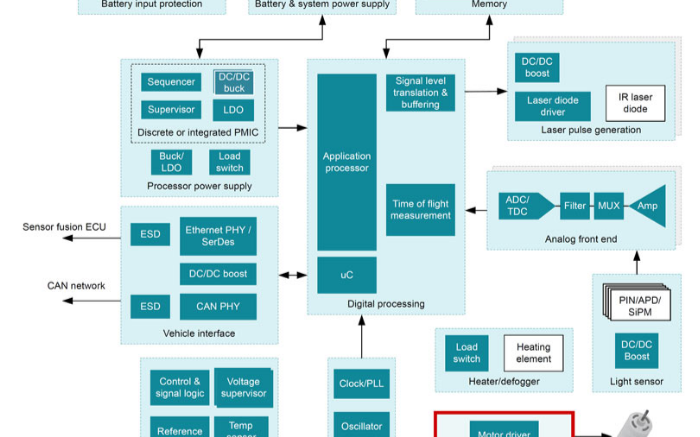
激光雷达系统的视场 (FOV) 决定了激光雷达能够捕捉到的图像的宽度,因此该视场对于自动驾驶决策算法十分重要。
2022-03-07 14:21
激光雷达的基本构成 激光雷达前景分析 激光雷达基本构成 激光雷达是利用激光信号进行测距的设备,其基本构成包括
2023-08-23 16:28
LiDAR(Light Detection and Ranging,激光探测与测距)是一种利用激光技术进行距离测量和成像的技术。LiDAR激光雷达扫描仪具有高精度、高分
2024-08-29 16:58
发射一条激光束,而多线激光雷达则同时发射多条激光束。单线激光雷达通常使用旋转镜和激光二极管的组合来
2023-12-07 15:48
激光雷达是什么? 激光雷达(英文:Lidar),激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通
2022-06-20 16:53
