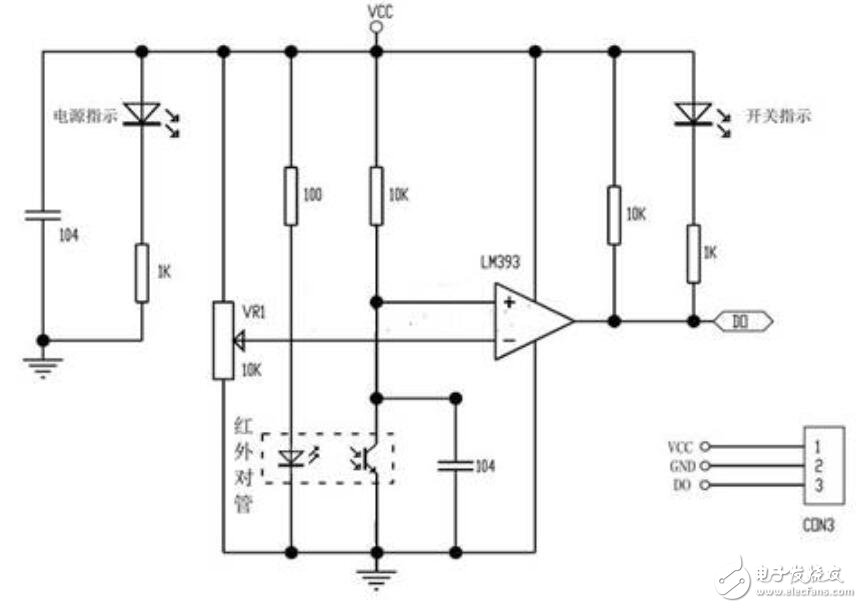
红外避障主要是以红外测距传感器为主。红外测距都是采用三角测距的原理。红外发射器按照一定角度发射红外光束,遇到物体之后,光会反向回来,
2019-09-12 09:12

本本文介绍了一种基于激光雷达数据的激光网络自动驾驶三维目标检测方法——LaserNet。高效的处理结果来自于在传感器的自然距离视图中处理
2019-06-02 10:00
激光雷达和与之竞争的传感器技术(相机、雷达和超声波)加强了对传感器融合的需要,也对认真谨慎地选择光电探测器、光源和MEM
2018-04-07 12:18
激光雷达(LiDAR)是一种用于精确获得三维位置信息的传感器,好比人类的眼睛,可以确定物体的位置、大小、外部形貌甚至材质。
2020-07-13 10:55
激光雷达的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到地面的树木,道路,桥梁和建筑
2020-07-13 11:00
避障与SLAM是既有联系又有区别的两个不同功能,虽然SLAM在建图过程中,已经通过一种或多种传感器进行了周边环境的障碍物检测
2018-07-24 11:23

(长沙)测试区即将打造完成雨、雾、光、尘等典型测试场景,也是目前国内唯一同时具备雨、雾、光、尘等场景的测试区,可满足激光雷达等传感器大批量可复现的真实环境测试需求。
2023-07-05 11:13
3D激光雷达的出现是为了满足系统对于实时空间感知的需求而出现的,无人驾驶汽车、无人机等自主移动式机器人出于空间识别、自主避障、规划路线的目的,需要一个传感器能够实时对于
2019-10-28 16:13

