点云是世界的一种非结构化三维数据表示,通常由激光雷达传感器、立体相机或深度传感器采集。它由一系列单个点组成,每个
2024-10-29 09:21

本本文介绍了一种基于激光雷达数据的激光网络自动驾驶三维目标检测方法——LaserNet。高效的处理结果来自于在传感器的自然距离视图中处理激光雷达数据。在
2019-06-02 10:00
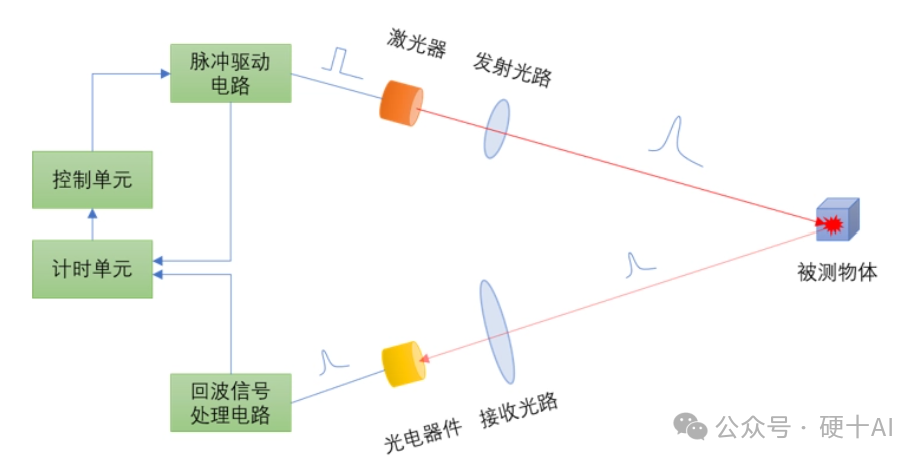
激光雷达是一种以发射激光束来探测目标位置、速度等特征量的雷达系统。 这个系统也可以通过扫描发射和接收装置来获取目标物体的三维
2024-11-07 09:28
三维激光扫描技术又被称为实景复制技术,是测绘领域继GPS技术之后的一次技术革命。它突破了传统的单点测量方法,具有高效率、高精度的独特优势。三维激光扫描技术能够提供扫描物
2018-03-02 15:43
汽车上的激光雷达,俗称车载激光雷达,而车载激光雷达又称车载三维激光扫描仪,是一种移动型
2017-02-04 17:40

摘要这款DIY的PiLiDAR扫描仪项目利用树莓派进行激光雷达测绘。激光雷达通过发射激光来扫描周围环境,从而创建三维模型。该项目需要树莓派4、摄像头、电机以及
2025-06-01 08:33 上海晶珩电子科技有限公司 企业号
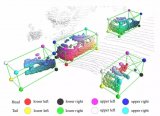
与二维图像中会相互遮挡的物体不同,三维点云中的物体都是天然分离的,使得三维目标内部各个部分的相对位置可以精确获取,这些方
2019-08-02 14:18
该方法具体通过六个步骤实现:图像的采集、系统相机标定、特征模板匹配、图像处理、三维仿真匹配以及三维重建。首先,通过两个相机于不同位置对待测物体进行图像信息感知获取。然后根据三
2023-09-01 16:12
激光雷达(LiDAR)是一种用于精确获得三维位置信息的传感器,好比人类的眼睛,可以确定物体的位置、大小、外部形貌甚至材质。
2020-07-13 10:55
三维计算视觉研究内容包括: 1)三维匹配 :两帧或者多帧点云数据之间的匹配,因为激光扫描光束受物体遮挡的原因,不可能通过
2023-06-19 11:06