lidar_camera_calibration项目——激光雷达和相机联合标定
2019-04-12 09:27

本文提出了一种自动在线激光雷达相机自标定方法CFNet。CFNet是全自动的,不需要特定的校准场景、校准目标和初始校准参数。我们定义一个校准流来表示初始投影点的位置与地面真值之间的偏差。
2023-10-10 11:44
作者:Raphael Voges and Bernardo Wagner 来源:IROS 2020 大家好,今天为大家带来的文章是—— 集员法对3D激光雷达和相机的外部校准
2021-05-26 09:15
来自CMU Robotics Institute, 已知最早3D Laser与相机标定的工作(2005年),基于matlab的图形用户界面,进行激光雷达相机外参标定。
2022-11-10 14:59
激光雷达因其可靠性目前仍是无人驾驶系统中最重要的传感器,然而,在现实使用中,激光雷达并不是完美的,往往存在点云过于稀疏,甚至丢失部分点的问题,对于不规则的物体表面,使用激光雷达很难辨别其模式,在诸如大雨天气这类情况下
2019-01-21 16:06
Innovusion团队展示了最新的半固态激光雷达样机Hi Def LiDAR。他是激光雷达与相机的融合, 分辨率可以达到300线以上,主攻方向是传感器和传感器融合技术,不涉及车辆的控制。
2017-12-13 12:42

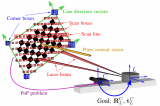
为了解决外参逐渐漂移的问题,提出了一种基于线的方法,可以在真实场景中实现激光雷达和相机的自动在线外参标定。首先,从点云和图像中提取和过滤线特征。然后,利用自适应优化方法提供精确的外部参数。然后在KITTI基准上用地面真值对其进行了评估。
2023-08-31 10:50

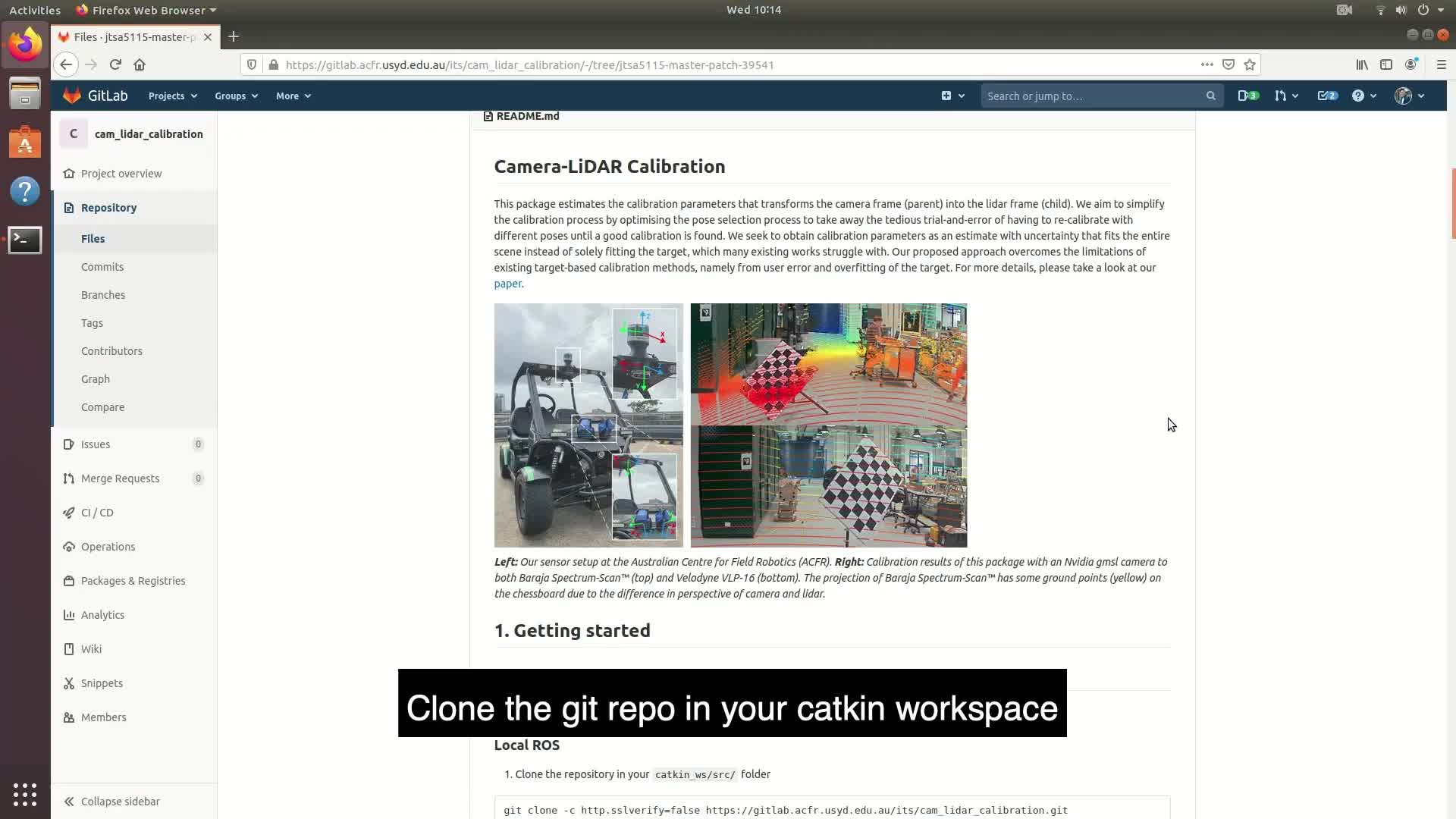
ROS功能包:livox_camera_lidar_calibration提供了一个手动校准Livox雷达和相机之间外参的方法,已经在Mid-40,Horizon和Tele-15上进行了验证。 其中
2023-11-28 11:09